
27・3・1 雲エアロゾル測定
大気境界層から対流圏・成層圏のエアロゾル及び雲観測へのライダー(LIDAR)の応用は初期から行われているが、近年の地球環境観測におけるエアロゾル・雲研究の重要性からも盛んな応用分野でもある.
大気境界層から対流圏・成層圏のエアロゾルおよび雲観測へのライダー(LIDAR)の応用は初期からおこなわれているが,近年の地球環境観測におけるエアロゾル・雲研究の重要性からも盛んな応用分野でもある.
大気中のエアロゾルは散乱・吸収を通して放射収支に直接影響を与えるとともに,雲核として作用するなど間接的に影響を及ぼしたり,表面で、起こる化学反応を通じて,近年,地球温暖化や地球大気環境に影響を与える物質としてその性状やグローバルな分布の観測が求められている.ライダー(LIDAR)を用いたエアロゾルの観測は,地域的な特性把握のために航空機や船舶,車などの移動休観測を含めて集中的におこなう方法と,定点ないしは多地点においてより長期的な観測をおこなう方法があるが,いずれにおいてもエアロゾルの鉛直分布を与える唯一の測器として広く用いられている.
技術的には,レーザーや干渉フィルタなどの周辺光学技術およびライダ一計測用エレクトロニクス,光検出器の発展によって,ミー散乱およびラマンライダー(LIDAR)の製作は比較的容易になってきた.安定したレーザー光源としてQ-SW型Nd:YAGレーザーの基本波(1064 nm),第二高調波(532 nm),第三高調波(355 nm)がよく使われる.可視・紫外域では光電子増倍管が光検出器としてよく用いられるが,1064 nmではSi-APD(アバランシェフォトダイオード)も最近ではよく用いられている.エアロゾルの光学特性と輸送の研究のため,ラマンライダー(LIDAR)などによる高度化や,長期間のモニタリング用に適した連続自動化12)14)も進められている.
高度約10~15 km(地域・季節によって異なる)までの対流圏では,大気の対流活動に伴って雲・降水などの気象現象が生ずるが,雲や降水・降雪からの後方散乱はエアロゾルにくらべて桁違いに大きく,高層にあって比較的光学的に薄い巻雲を除けば,レーザー光の減衰が激しく,また,多重散乱の効果が大きくなるため,定量的な解析が困難である.ここでは,主にエアロゾル観測への応用について述べる.
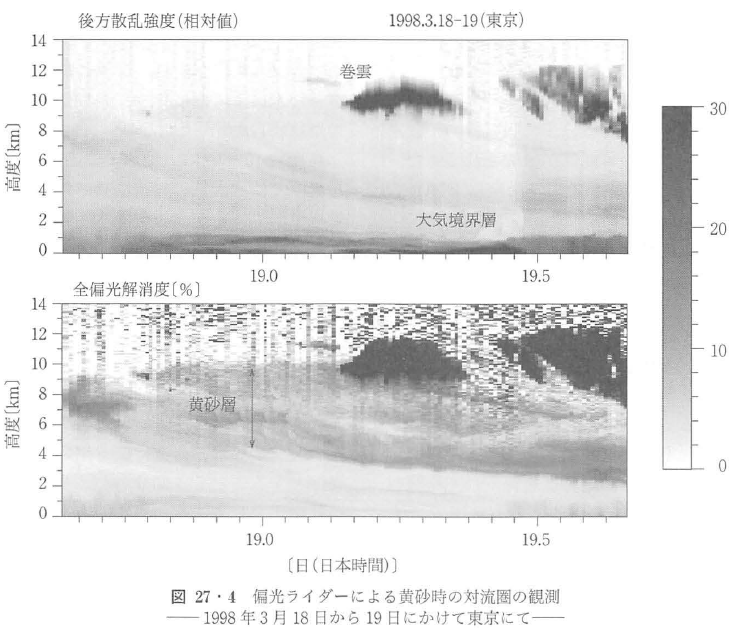
ミー散乱ライダー(LIDAR)は,エアロゾルをトレーサとすることで混合層の構造をとらえるなど,地上約2 km程度までの大気境界層の研究に広く用いられてきた32).空間走査型とすることで空間分布がより良〈把握できるが時系列変化を観測するために鉛直上方を連続観測することが多い.後方散乱光の偏光解消度を測定することで,非球形粒子である黄砂や巻雲の識別が定性的に可能である33).
図27・4に偏光ライダー(LIDAR)による地表付近から高度14kmまでの黄砂現象時のライター観測を示す33).巻雲は30~50%程度の大きな偏光解消度を示すのに対し,大気境界層では通常数%以下で,黄砂層は10~20%程度の値を示す. ミ一散乱ライダー(LIDAR)では,大気分子によるレイリー散乱成分とエアロゾルによるミー散乱成分を分離できないので,エアロゾルのライダー(LIDAR)比Sa(=消散係数αa/後方散乱係数βa)を仮定することで,後方散乱係数および消散係数の鉛直分布を導出する12).日中晴天時のサンフォトメータによる同時観測により光学的厚さを拘束し,空間平均のライダー(LIDAR)比を求めて消散係数の誤差を減らすことができるが34),一般にはライダー(LIDAR)比はエアロゾルの粒径分布,屈折率,形状に依存する35).
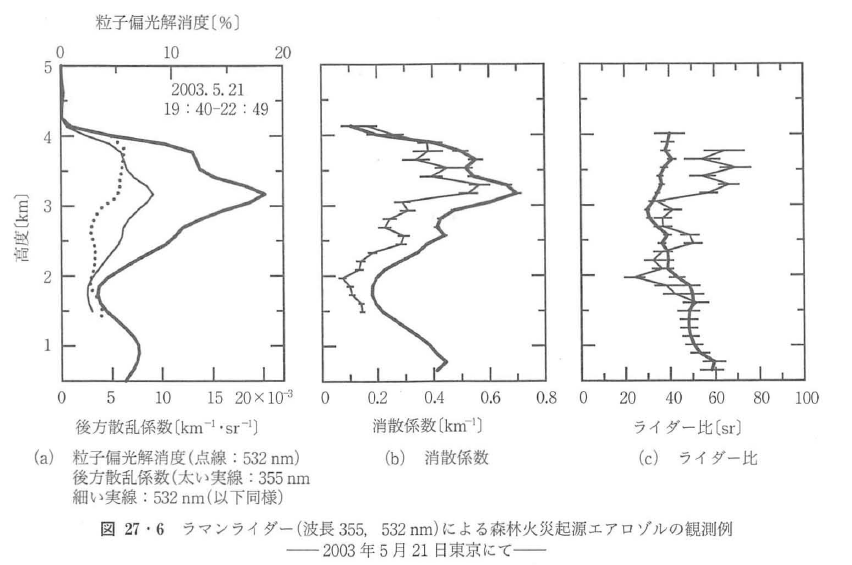
ラマンライダー(LIDAR)では,ミー散乱信号と窒素(または酸素)分子と水蒸気分子からの振動ラマン選移によるラマン信号を用い,エアロゾルの後方散乱係数と消散係数および水蒸気混合比の同時計測が広くおこなわれている.ラマン散乱の効率は波長の4乗に反比例するので可視または紫外光が使われるが,散乱効率が小さく,主に夜間の観測に限られる.エアロゾルのライダー(LIDAR)比やその波長依存性がエアロゾルのタイプによってかなり異なることが報告されている36).さらに観測波長を多波長化することでエアロゾルの粒径,屈折率などの微物理量が求められている37).固定型ライダー(LIDAR)をネットワーク化することで,広域でのエアロゾルの輸送や変質が観測されている14)38).特に,砂塵風起源の鉱物性ダストおよび森林火災起源の燃焼エアロソルは自由対流圏を長距離輸送される典型的なエアロゾルとして観測され,地球放射収支への影響も大きい.例として,中国の砂漠域から輸送された黄砂とシベリヤの森林火災起源エアロゾルのラマンライダー(LIDAR)による東京での観測例を,図27・5と図27・6に示す.

ライダー(LIDAR)による雲の観測では,偏光ライダー(LIDAR)を利用して雲の相状態を判別する方法がおこなわれている.巻雲については比較的多くの研究がなされている33).ライダー(LIDAR)と赤外放射計39)や雲レーダ40)による観測を組み合わせて雲水量や雲の微物理量を推定する研究もおこなわれている.偏光ライダー(LIDAR)による観測から黄砂が巻雲生成に影響を与えている過程も観測されている(図27・4参照)41).水雲に対しては多重散乱を利用して雲の粒径を
求める試みがなされている42).雲底高度を測定する雲高計(ceilometer)はライターの最も簡便な応用で,高繰返しの半導休レーザーを用いたシステムが市販されており,混合層高度の測定にも応用されている.
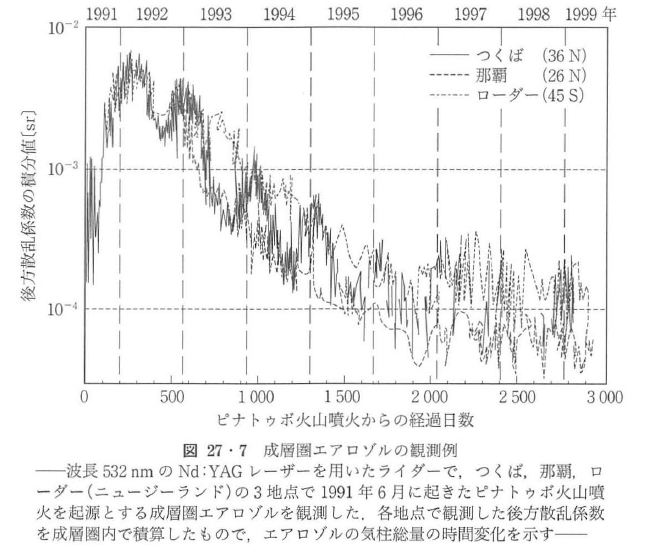
高度約10~15 kmを超える成層圏には,ユンゲ層と呼ばれるエアロゾル層が定常的に存在していることが以前より知られているが,その形成過程はいまだ明らかになっていない.また,大規模な火山噴火では,大量の火山灰が成層圏に注入されて成層圏に滞留し,その後,数年間にわたって地上気温の低下や成層圏オゾンの減少などの影響を及ぼす.このような成層圏エアロゾルの観測は,地球温暖化やオゾン層破壊の問題がクローズアップされる近年,その重要性が増加している.
ライダー(LIDAR)による観測は,ほかの手法とくらべて,高い高度分解能を持つ,オゾンホールなどのオゾン破壊が起こる極夜中の観測が可能,などの特徴を持ち,成層圏エアロゾルの標準的な観測手法の一つとして広く用いられてきている.図27・7につくば(北緯36°),那覇(北緯25°),インドネシア・バンドン(南緯7°),ニュージーランド・ローダー(南緯45°)で観測された成層圏エアロゾルの全量(後方散乱係数の積分値)の変化を示す.緯度の異なる場所でそれぞれ特徴的な変化が見られている.このような観測は,全地球的なネットワークとしてNDSC(Network for the Detection of Stratospheric Change(https://www.ndsc.ncep.noaa.gov/))が組織され,観測がおこなわれている.
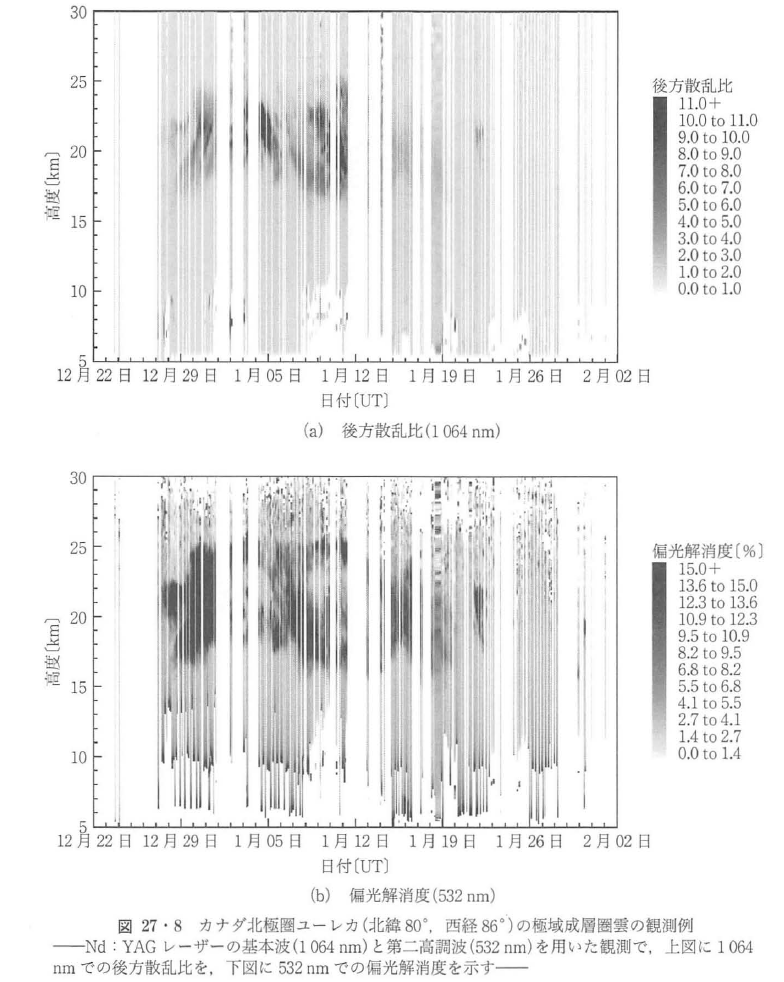
極域においては,極夜中に形成される極域成層圏雲(PSC)が極域成層圏の春季に起こるオゾン破壊に大きな影響を与えることが知られてきている.オゾン破壊が進む過程では,気相と液相,あるいは気相と固相との異なった相が接する場所で起こることから,不均一反応と呼ばれる化学反応がPSCの表面で起こり,これが非常に重要な役割を果たしている.このPSCは,主に太陽光のない極夜中で形成されるため,太陽光を光源とする受動的な手法では観測することができないため,ライダー(LIDAR)による方法が唯一の遠隔測定手法となっている.図27・8に,カナダ北極圏ユーレカ(北緯80°,西経86°)での観測例を示す.
27・3・2 水蒸気測定
無料ユーザー登録
登録することで3000以上ある記事全てを無料でご覧頂けます。
- @optipedia.info ドメインより登録の手続きを行うためのメールをお送りします。受信拒否設定をされている場合は、あらかじめ解除をお願いします。
- Gmailをお使いの方でメールが届かない場合は、Google Drive、Gmail、Googleフォトで保存容量が上限に達しているとメールの受信ができなくなります。空き容量をご確認ください。