LiDAR (ライダー)とは? (学習コンテンツ)
測地学、地理情報学、考古学、林業、自動運転等の各分野で用いられ、地上・空中など、様々な場所・環境下で利用できます。
LiDAR の歴史と語源
 |
 |
|---|
LiDAR (ライダー)は、国立/大気研究センターが気象分野において大気中の雲測定用途で用い始めました。その有用性・利便性を世間が広く認知したのは、1971年実施のApollo 15計画による「月面着陸飛行」の際、宇宙飛行士によるレーザー高度計用いた月面地図作成が大きいです。
「 LIDAR (lidar)」は、一説では頭字語と言われますが、元々は、光(light)とレーダー(radar)を混ぜた造語です。LiDAR(ライダー)という言葉が最初に出版物で記述されたのは1963年で、明確にこれを裏付けています。それには「レーザーは遠方の物体からの特定の波長を検出できる、極めて敏感な検出器に応用し得る。一方、それは ‘LiDAR(ライダー)’(光レーダー)によって月を研究するために使われている…」とあり、Oxford English Dictionaryはこの語源を支持しています。
(「LIDAR」)としての「LiDAR(ライダー)」の解釈は1970年に始まり、根拠として挙げられるのは、用語「レーダー(radar)」は「RAdio Detection And Ranging(無線の検出と測距)」の頭文字であるため「LIDAR(LIDAR)」は「LIght Detection And Ranging(光の検出と測距)」もしくは「Laser Imaging, Detection and Ranging(レーザーイメージング、検出と測距)」の頭文字であるという論です。英語では現在、「radar(レーダー)」を頭字語として扱わず出版物では小文字を用いますが、1980年代からの複数の出版物では、「lidar(LIDAR)」という言葉を「LIDAR(LIDAR)」として、大文字で記述しています。
現時点では、「LIDAR」が頭字語か頭字語であるなら「レーダー」のように小文字で表記すべきかの不確実性を反映し、全て小文字で書かれます。複数の出版物では、LIDARは「LIDAR」、「LiDAR」、「LIDaR」、または「Lidar」と記述されています。USGS(アメリカ地質調査所)は 「LIDAR」と 「lidar」の両方を、時には同じ文書中で使用しています。
概要
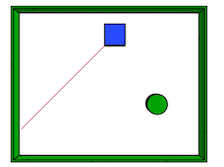
LiDAR (ライダー)は、紫外線・可視光、または近赤外波長のレーザー光を物体へ照射し、光が跳ね返ってくるまでの時間を計測し、物体までの距離・方向を測定するもので、物体の物理的特徴を、高い分解能で写像します。LiDAR(ライダー)は気象・航空・宇宙研究等の各分野で実用化されており、例として、航空機による上空からの地形マッピングで用いられる他、航空・宇宙分野にて、NASAは、安全な月面着陸・車両走行を行う重要技術と認識し、研究・開発を進めています。
散乱タイプは用途で異なり、レーリー散乱・ミー散乱・ラマン散乱、及び蛍光が使われます。後方散乱の種類に基づき、LiDAR(ライダー)名称は変化し、レイリーLiDAR(ライダー)、ミーLiDAR(ライダー)、ラマンLiDAR(ライダー)、Na / Fe / K蛍光LiDAR(ライダー)等と呼ばれます。
構成
 |
 |
 |
|---|
LiDAR (ライダー)の構成は、大きく2種類に分けられます。
1) マイクロパルス LiDAR (ライダー)方式:
低出力(1ワットオーダー)レーザーを用いる為に目に優しく、レーザー技術の進歩とコンピュータ演算能力向上により、この方式が可能となりました。
2) 高エネルギー方式:
気象分野研究で主に用いられ、雲の高度・層構造・粒子性質、温度、圧力等の大気パラメーターを測定できます。
要素
1. レーザー
航空機搭載型 LiDAR (ライダー)では一般に1064 nm波長のレーザーを、海底探査システムでは、水中透過性の高い532 nm波長のレーザーを用います。測定時は、適切な発光間隔・発光時間の条件設定が求められます。又、空中トポグラフィックマッピング LiDAR (ライダー)では1064 nmのダイオード励起YAGレーザーを、水深測定システムでは、532 nmの二重ダイオード励起YAGレーザーを、それぞれ使用します。
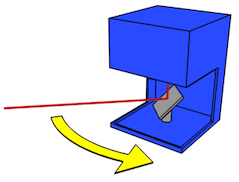
2. スキャナと光学系
データ収集速度はシステムのデータ走査速度にも影響されます。走査は二次元的に行われ、その方法は様々です。二枚の平面鏡を振動させるもの、多角形の鏡を用いるもの、スキャナが二軸をもつものなどがあります。光学系の性能は角度方向の分解と検出できる距離の限界に影響します。
反射光の分離には穴の開いた鏡を用いる方法とビームスプリッターを用いる方法があります。
3.受光器と電子機器
受光器には、様々な物質が用いられます。ケイ素とインジウムガリウム砒素を用いた「ピンフォトダイオード」や「アバランシェフォトダイオード」が一般的ですが、波長によっては、光電子増倍管も使われます。受光器の感度は、LiDAR(ライダー)の他部分の設計とバランスを取る必要があります。
4.ポジショニングとナビゲーション
LiDAR(ライダー)を可動型のプラットフォーム(航空機や人工衛星)に搭載する場合、センサーの絶対的な位置と方向を決定する装置が必要で、主にGPSと慣性誘導装置が用いられます。3Dイメージングは走査システムと非走査システムの両方を用いて達成することができます。「3Dゲート表示レーザーレーダー」はパルスレーザーと高速ゲートカメラを適用する非走査レーザー測距システムで、DLP技術を用いたバーチャルビームステアリングの研究が始まっています。
イメージングLiDAR(ライダー)は、CMOS 及び ハイブリッドCMOS/CCD製造技術を使用して通常単一チップ上に構築された高速検出器アレイおよび変調感度検出器アレイを使用して実行することも可能です。これらのデバイスでは各ピクセルが復調またはゲート制御などのローカル処理を高速で実行し、アレイをカメラのように読み取ることができるように信号をビデオレートにダウンコンバートします。この技術を使用して、数千のピクセルとチャネルを同時に取得可能です。
高解像度3DLiDAR(ライダー)カメラは電子CCDまたはCMOSシャッターでのホモダイン検出を使用します。コヒーレントイメージングLiDAR(ライダー)は合成アレイヘテロダイン検出を使用して、スタッキング単一素子受信機をイメージングアレイであるかのように動作させます。
2014年にリンカーン・ラボラトリーは16,384ピクセル以上の新しいイメージング・チップを発表しました。それぞれのピクセルが単一の光子を撮影し、一つの画像で広い領域をキャプチャすることができます。
LiDARに関するニュース
ニュース
- 2024年2月14日 慶應義塾大学他/自動運転用LiDARセンサーに対する網羅的セキュリティー調査を世界で初めて実施【オプティニュース】
- 2024年2月2日 独・ダイムラー・トラック社他/Daimler Truck and TORC Robotics Select Aeva to Supply Advanced 4D LiDAR Technology for Series-Production Autonomous Trucks【オプティニュース】
- 2024年1月29日 アメリカ科学振興協会(Science)/Two thousand years of garden urbanism in the Upper Amazon【オプティニュース】
- 2024年1月26日 米・メラー・オプティクス社/CUSTOM LIDAR OPTICS MATCH TRANSMISSION REQUIREMENTS【オプティニュース】
- 2024年1月26日 米・セヨンド社/Seyond to Deliver High-Performance LiDAR to Avikus for Autonomous Boat Technology【オプティニュース】
- 2024年1月19日 Kudan株式会社/米国のマッピングソリューションプロバイダであるInertial Labs、Kudan Lidar SLAMを搭載したデジタル化向け次世代RESEPIスキャナーの販売を決定【オプティニュース】
- 2024年1月19日 ブルーイノベーション株式会社/約5,100㎡ の地下鉱山トンネル内の点群データの取得をわずか18分で完了。 正確度0.1%、精度±6mm(標準偏差)の高精度を実現【オプティニュース】
- 2024年1月17日 株式会社eve autonomy/リコーインダストリー様 屋外対応型自動搬送サービス『eve auto』を導入【オプティニュース】
光響プレスリリース
- 2023年7月26日 高性能LiDARセンサー及びマッピングカメラで高画質の3次元点群データを作成、GreenValley International社製UAV LiDARシステム(製品名:LiAir X3C-H)を販売
- 2023年4月26日 飛行中のドローン及び周辺環境の安全性を高める球体ガードを販売開始
- 2023年4月7日 500mロングレンジ、ウルトラワイドスキャンのフラッグシップLiDAR Innovusion社製”Falcon Prime”をリリース
- 2023年3月8日 至近距離測定に適したLivox社製LiDARの販売を開始
- 2021年10月20日 第66回 森林計画研究発表大会についてのお知らせ
- 2021年10月6日 弊社取り扱いバックパック型LiDAR(GVI社製)/第38回センシングフォーラム計測部門 ポスターセッション優秀賞を受賞
- 2021年8月27日 弊社取り扱い製品(Livox社製LiDAR)/利用事例のご紹介
- 2021年8月24日 持ち運び可能なコンパクト・軽量タイプの「地上設置型LiDAR(製品名LiPod)」を8月25日(水)より発売、広範囲を高精度にカラー・三次元点群化
- 2021年7月1日 GVI製バックパック型ライダーを用いた「森林調査法開発の促進」についてのお知らせ
- 2020年12月4日 距離450mの長距離測定に適したLivox社製LiDARの販売を開始
- 2020年11月30日 低速自動運転に適したLivox社製LiDARの販売を開始
- 2020年11月17日 視野角が約2倍に広がったドローン搭載用LiDARユニットを販売
- 2020年10月29日 Livox社製 LiDAR「Mid-70」及び「Avia」の取扱い開始についてのお知らせ
- 2020年7月8日 上空から地形を簡単に点群データ・地図化し、災害時に威力を発揮 「ドローン搭載用LiDAR LiAir V70セット」を販売開始
- 2020年6月10日 フルスペック3Dマッピング装置「バックパック型LiDAR DGC50」を6月10日より販売
LiDAR製品一覧