
27・1・1 ライダー(LIDAR)方程式
レーダー(RADAR:radio detection and Ranging)は,英名のごとく電波によって遠くの物体を検知し,その物体までの距離を計測するリモートセンシング(遠隔計測)技術である.レーダーで用いられる電波は概して3 mm~3 m(周波数にして0.1 MHz~100GHz)の波長領域のため,最小検出可能な物体の大きさはミリメートル程度である.
レーザーが発明された1960年の翌年には,レーザーを送信機に用いたレーダーすなわちレーザーレーダー(Laser Radar)の研究が始められている.その大きな理由は,最初に発振したルビーレーザーの波長が0.69432 μm(周波数にして432 THz)と人類が発生させたコヒーレント電磁波では最も短波長であり,光と物質間で生じる相互作用すなわち光散乱現象を応用すると最小検出可能な物質として空気分子(N2,O2など)やサイズが波長と同程度あるいは波長以下の大気のちりなどの検知へと測定領域が飛躍的に拡張し,工学,地球科学,宇宙科学への貢献が期待されたためである.その後のレーザーレーダーは,レーザー技術,エレクトロニクス技術,コンピュータ技術の進展に支えられて当初の期待を裏切ることなく発達し先端技術として確立された.近年では自動車,航空機を含む移動体の事故防止センサーとして,大気汚染ガスの監視,酸性雨,オゾン層破壊,温暖化などの地球環境観測,また人工衛星に搭載して宇宙からの地球環境監視用リモートセンシング技術として,また宇宙探査の先兵として火星や金星の地表面マッピングなどと幅広い分野への技術応用展開が始まっている.
なお,レーザーレーダーは最近では光レーダーという意味合いからライダー(LIDAR : Light Detection And Ranging)と呼ばれてきているので,本章でも以降,ライダー(LIDAR)を用いる.
ライダー(LIDAR)送信機用レーザーには,通常,大きな信号対雑音比(signal to noise ratio, S/N)を得て測定精度を上げるために,また高い距離分解能を得るためにパルス動作のレーザーが用いられる.
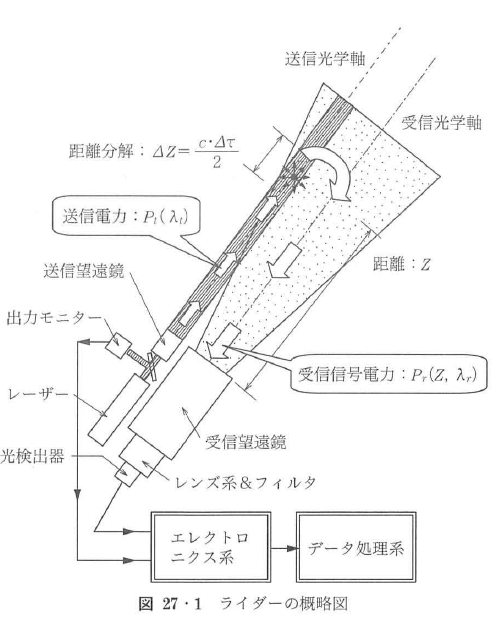
図27・1に,ライダー(LIDAR)の原理図を示す.出力Ptのレーザー光は,送信望遠鏡でビーム拡がりを抑えられ平行ビームとして大気中に打ち出される.大気伝搬中のパルスレーザー光は,光路中に存在する物質(原子,分子,エアロゾル(大気中に浮遊している微粒子の総称),雲,煙)などと次々に散乱・吸収を起こした後,伝搬して来た光路に沿って逆伝搬して時々刻々と受信望遠鏡に到達する.到達した散乱光はここで集光され,さらにレンズ系と光学フィルター系を通過した後に光検出器の光電面に入射する.この時,光電面上での受信信号電力はPrとなる.ここで光学フィルタ系は,後で述べる信号体雑音(S/N,signal to noise)比を大きくするために太陽光に起因する直射的,間接的な背景光雑音スペクトルの内,レーザ波長以外のスペクトル光遮断用として挿入されている.
無料ユーザー登録
登録することで3000以上ある記事全てを無料でご覧頂けます。
- @optipedia.info ドメインより登録の手続きを行うためのメールをお送りします。受信拒否設定をされている場合は、あらかじめ解除をお願いします。
- Gmailをお使いの方でメールが届かない場合は、Google Drive、Gmail、Googleフォトで保存容量が上限に達しているとメールの受信ができなくなります。空き容量をご確認ください。