
ライダー(LIDAR)のようなリモートセンサは,衛星などの飛翔体に搭載することで,地上設置では得られない地球規模の広域観測や,さらには,ほかの惑星の計測が可能となる.衛星搭載ライターは,外国においてspace lidarと呼ばれるため,その日本語訳として宇宙ライダー(LIDAR)を使用している.
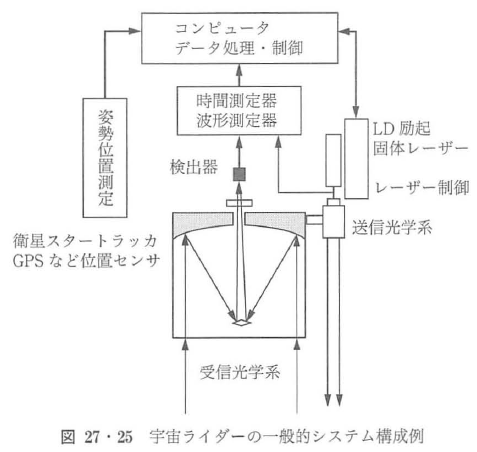
図27・24に衛星に搭載した宇宙ライダー(LIDAR)の運用イメージを示す.宇宙ライダー(LIDAR)のプラットフォームとしては,通常の衛星に加えてスペースシャトルや国際宇宙ステーションなどの有人システムも利用される.図27・25に宇宙ライダー(LIDAR)の一般的なシステム構成例を示す.衛星から下向きに光学系が向いている点と衛星の姿勢位置測定装置を有する点が地上設置ライダー(LIDAR)と大きく異なる.
宇宙ライターでは,宇宙環境や打上げ環境を考慮したハードウェア設計が求められる.まず最も大きな違いは熱設計である.地上においては重力と大気の存在により,レーザー機器内部の熱も内部の対流によって熱が運ばれる割合が多いが,高真空・微小重力の軌道上の環境下では,こうした気体による熱伝導はほぼゼロとなり,直接的な部材の接触と表面どうしでの放射結合による伝熱だけが有効となる.機器全体としての放熱は,熱源のない深宇宙方向(等価黒体温度3K相当)に放射冷却器を向けることで外部に排熱する設計をおこなう.さらに機器内部では対流による温度の平準化か望めないために積極的な伝熱パスを設け,内部温度を平準化する必要がある.さもなければ,発熱部で急激な温度勾配が発生してしまい,機器の損傷を招くこととなる.
ロケット打上げに伴う激しい振動衝撃に耐える構造設置も必要である.振動衝撃のレベルは機器自重,ロケットの種類,あるいは衛星との機械的インタフェースの仕様に大きく左右される.たとえば,10~20 Grms(overall)程度のランダム振動や,20 G程度の静荷重,ピーク加速度100~200 G程度の衝撃での耐性,および50~100 Hz程度の高い機械的固有振動周波数(剛性)が求められる.一方,レーザー発振器は内部の光学素子の設置に秒単位の高いアライメント精度を通常は求められており,かつ,それらの一般的な材料は脆性の高い硝材などを含むことが多い.そうした機械的に繊細な部材を厳しい機械環境下で支持する最適設計をおこなうことも重要である.また熱設計(既述)とかかわって,各部の温度差が大きければ,材料の線膨張率の違いによる機械的ひずみが生じ,同様にアライメントを保持することがむずかしくなる.ことに,受光系の集光鏡において有効口径が大きい大型の鏡の場合には,大型化により線膨張率の差が大きく出るため,鏡面の視度分布によっては面精度を保持することが困難になる.ライダー(LIDAR)の集光鏡はエネルギーを集めるのが目的であり,結像光学系のような高い面精度は通常は不要ではあるが,比較的大型の鏡を必要とする場令が多い.たとえば,直径1 mの集光鏡を考えると1~2λ[rms](λ=633 nm)程度の面精度を持つ必要がある.このため,母材には,通常の鏡としての光学的特性のほか,低線膨張率や軽量化のための高剛性など熱構造的な優位性が求められる.通常の衛星搭載光学系では加工性や光学特性からZerodurゃULEといった超低線膨張率を持つ硝材が採用されることが多いが,これらは強度的には優れた材料であるとはいえない.よって,大きな主鏡を使用する傾向にあるライダー(LIDAR)では,低線膨張率を持ちながら,より高強度なベリリウムやシリコンカーハイドなど硝材以外の母材の研究が盛んにおこなわれ,実際に使用されている.
無料ユーザー登録
登録することで3000以上ある記事全てを無料でご覧頂けます。
- @optipedia.info ドメインより登録の手続きを行うためのメールをお送りします。受信拒否設定をされている場合は、あらかじめ解除をお願いします。
- Gmailをお使いの方でメールが届かない場合は、Google Drive、Gmail、Googleフォトで保存容量が上限に達しているとメールの受信ができなくなります。空き容量をご確認ください。