
レーザーを利用した計測は,多くの産業分野で利用されており, その計測技術は著しい進歩を遂げている.レーザー計測は,非接触,高速時間応答,高感度で本質的に電磁ノイズの影響を受けにくいといった点で電気電子計測にはない特徴がある.従来ある光学式計測機器の光源をレーザーに置換することで性能や信頼性が改善されたものや,新たな応用分野を開拓したものがあるが,いずれもレーザーの単色性,光の高い周波数を利用して,応用光学機器や電子計測機器ではなしえなかった装置の高機能化を達成しているといえる.最近では,長さ標準の一つにレーザー波長を推奨するようになってきており,計測の基準としても重要な役割を果たしている.
レーザー計測技術は研究用測定技術あるいは,研究室内での測定技術として位置づけられ,高機能なシステムとして応用が限定されてきたが,最近ではレーザーが安定・安価に入手できるため,一般的な測定手法として測定機器やセンサとして製造や工程管理などに広く使用されるようになってきた.これは,機械的精密測定具による接触計測の測定分解能がμmレベルであったのに対して,レーザー計測では,サブμmレベルの測定が容易に可能であるためといえる.特に近年,半導体レーザー(LD)や半導体レーザー励起レーザーの小型・高性能化,また,光ファイバやファイバグレーティング技術の進展が著しく半導体光センサやレンズなどの光学部品の製作・研磨技術革新に加えてデジタル技術の低コスト化もあって,従来実現できなかった計測用センサデバイスや計測システムも実現され,その利用分野は一層拡大してきている.
このようなレーザー計測が生産や検査に用いられるばかりかシステムの制御にも適用され,電気電子制御技術から光制御技術への移行が多くの産業分野でおこなわれている.
本章では,25・1にて,さまざまなレーザー計測を取り上げ,変位や角度,流速,濃度といった量に対する計測技術について概説する.また,25・2では,ファイバ応用計測について解説する.
25・1・1 長さ・変位の測定
長さ・変位の計測は,被測定物体の一点にレーザー光を照射し,その反射光や散乱光を検出して,変位や振動の振幅を1次元点計測する方法と, モアレトポグラフィーのように2次元面状計測を短時間でおこなう方法の二つに大別でき,いずれも用途が広く多くの産業分野に応用されている.1次元点計測は,測定を面や立体に走査することで面形状や立体形状の測定もできる.ここでは,1次元計測を取り上げて概説する.2次元面状計測法については文献1)に詳しい.
一般的に分解能,精度が高く要求される場合には干渉法を用いる.レーザー光源を用いることで,10 m程度の距離(変位)をpm程度の分解能で測定することも原理的に可能である2).一方,分解方式の測定をレーザーで置き換えて非接触に方式に替えたものや,三角測量方式は,散乱光あるいは反射光の強度や像を検出して1 m程度までの変位をサブμm程度の分解能で測定する手法として多く用いられる.
[1] 干渉法
(a) 通常の干渉計測
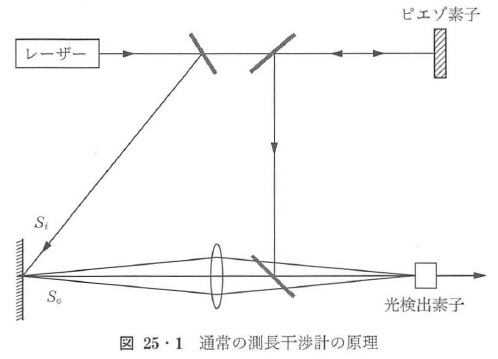
干渉計の一方の鋭を移動可としておき,移動台の直線平行運動に伴って発生する干渉縞の移動を光検出器で検出し,その強弱を計数して移動量を求める.図25・1のような光学系の配置が一般的である.
干渉計の強度は次式で表される.

ここで,Δφは位相差である.
![]()
dは変位であり,φ0は,変位がゼロのときの光路差である.普通,si,s0をともに被測定表面に垂直に近い方向に配置する.変位が波長にくらべて大きいときには干渉次数を計数すると変位が求められる.変位が光の波長より十分小さい場合には,強度変化から変伎を得る.感度を上げるためには,φ0を4/λとすればよいので,ピエゾ素子などで参照光の鋭を微調整して,条件を合わせ変位測定する3).
(b) ヘテロダイン干渉計測4)
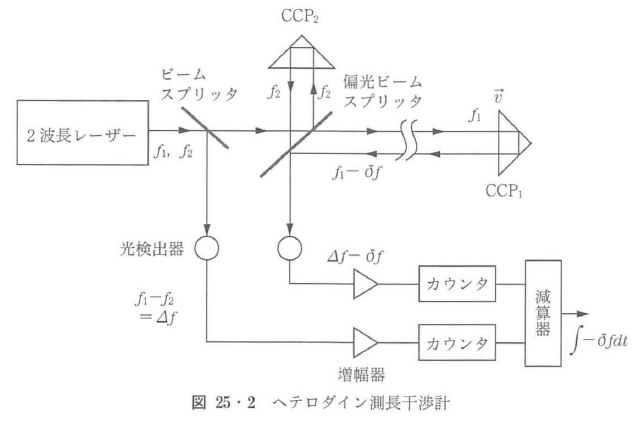
図25・2において,参照光の周波数を変調させ,被測定物からの反射光とのビートを検出する方法である.光の周波数を変調させるには,音響光変調器がよく用いられる.光源にゼーマン型の安定化レーザーを用いる場合もある.被測定物の変位に応じてビート信号の位相が変化するのを検出して変位に換算する.ビートの角周波数をΔωとすると,検出される光の強度は,次式となる.

この位相Δφの変化を測定する.大気のゆらぎなど外乱光による強度変化も受けにくいので,pm程度の感度で変位を測定できる.
[2] 散乱光計測
レーザー光を物体表面に照射し,その散乱光を照射方向や別の方向から光検出器で受光する方式は,大別して,伝搬測定方式,焦点合せ方式,三角測量方式があげられる.特に三角測量方式は半導体レーザーと光検出素子や位置検出素子と組み合わせることで小型・高精度な装置が安価に実現できるようになった.いずれも変位は,使用するレーザー波長より大きな変位を測定するのが一般的である.
(a) 光伝搬測定方式
長さ(10 m程度)を計測する場合,短いパルスレーザーを空間に送信して対象物からの反射光や散乱光が受信できるまでの時間差を計測して被測定対象の長さを求めることは容易である.
光パルスの飛行時間Δtを測定すると飛行距離すなわち対象の長さLは,
![]()
により求められる.ここでcは光速である.
この方式は,天体観測や長距離の計測では普及しているが,変位としてパルスの飛行距離を対象物からの反射光が受信できるまでの時間差を直接計測して距離を求めるので,およその変位を特定するには装置構成も単純で優れている.最近では,レーザー光源としてサブナノ秒の小型パルスレーザーが利用できるが,測定分解能は限られている.
分解能を適当に選んで変位量を特定するにはレーザー光の強度を正弦波状に高周波変調して送受信の位相差を比較して測定するのが一般的である5).装置構成概略を図25・3に示す.被測定対象の長さを往復した際に,この方式の変位計は,長さLが,
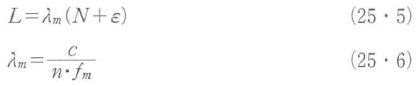
で計測される.ここで,λmは変調波長,fmは変調周波数,nは屈折率である.Nは正弦波の移動量の整数値(干渉縞の移動量の整数値に相当),εは端数値である.変調周波数は,電気的に100 MHz程度は容易に変化させることができるので,分解能は必要な値に設定することが可能である.10 m程度の測定距離に対して数cm程度のやや大きな変位測定をおこなう場合に採用される方式で,分解能は100 μm程度である.数百mから10 km程度のレーザー測距儀では多用されており,デジタル技術と組み合わせることで分解能も向上している6).
(b) 焦点合せ方式
図25・4に焦点合せ法による変位測定器の光学構成図を示す.
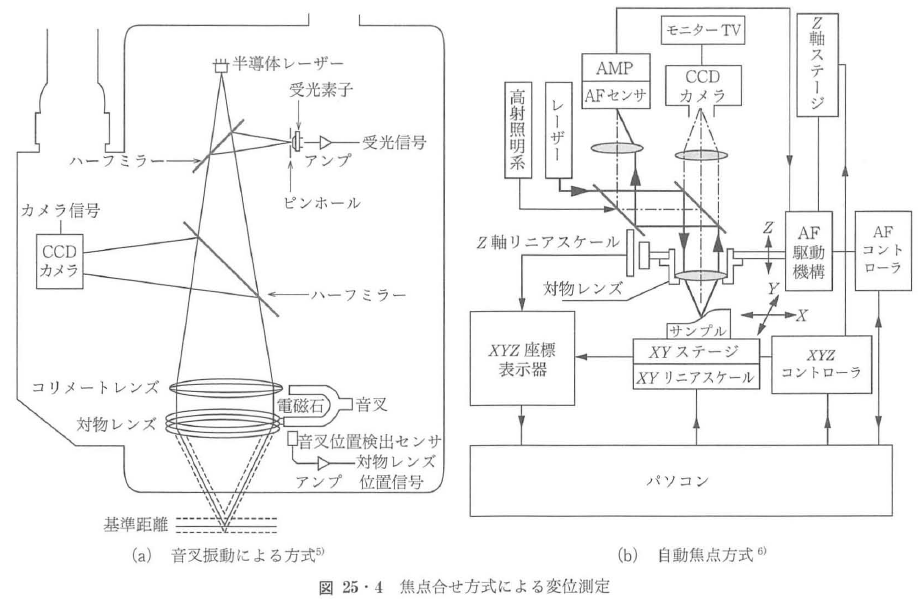
レーザー光を被測定物体にレンズで絞り込みながら照射し,測定面からの反射光を結像レンズで検出面に結像するように結像レンズ位置を変化させて,このときの対物レンズ-集光レンズの距離関係から変位を求める.装置の原理上,測定範囲は数cmまでが一般的で~μm程度までの測定分解能が得られる.表面の凹凸を測定する方式としては有効で,マイクロレンズなど光学部品の形状検査をする際などに用いられる7)8).
(c) 三角測量方式
図25・5(a)に三角測量方式の原型を示す.基準線の距離Lをあらかじめ与えて,両端から被測定物の一点を見込む角度をそれぞれ測定すると,被測定物までの距離Hが求められる.

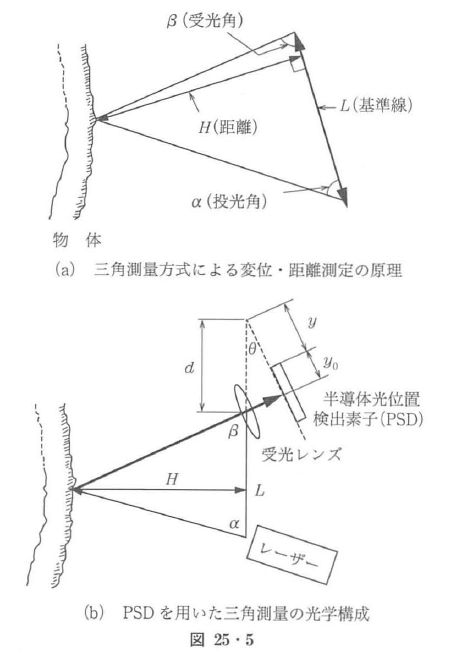
この原理を応用して,基準線の片端からレーザー光を被測定物体に照射し,反射光や散乱光をレンズで検出面に結像して距離(変位)を求めることができる.図(b)のように検出面をリニアアレイあるいは半導体位置検出素子(position sensitive device : PSD)にすると,レーザー光を一定の角度αで投光してビームの位置を判定して基準線に対する受光角βを容易に算出できる9).

このβを式(25・7)に代入して,距離Hが求められる.一般に基準距離Lが長くなると測量の距離Hの精度は低下する.誤差や精度に関する議論は,参考文献10)に詳細lが記述されている.
受光レンズを可動とすれば測定範囲は広がるが,時間応答特性の速い装置は複雑で高価となる.多くの計測器では,測定可能な距離の範囲を限定して被測定物の変位によってできる光点の軌跡が受光レンズを介してPSD表面上で,つねに適当な結像を得るためScheimpflug条件を満たすように,あらかじめ投光の光軸α,PSD面と基準線の方向θが設定されている10).原理的には基準線を長くして,100 m程度の変位を高分解能で測定することも可能であるが,一般的な市販品の測定可能な変位の範囲は±10 cm程度までで,分解能は測定範囲の1/2000程度である.
25・1・2 角度・角速度測定
無料ユーザー登録
登録することで3000以上ある記事全てを無料でご覧頂けます。
- @optipedia.info ドメインより登録の手続きを行うためのメールをお送りします。受信拒否設定をされている場合は、あらかじめ解除をお願いします。
- Gmailをお使いの方でメールが届かない場合は、Google Drive、Gmail、Googleフォトで保存容量が上限に達しているとメールの受信ができなくなります。空き容量をご確認ください。