
自動運転車:自律走行に向けて残る多くの課題
運転支援は容易だ。しかし、いつでもどこでも走行するためのすべての操作をロボットに肩代わりさせるのは、それよりもはるかに難しい。まず実現されるのは、良い天候の下で、よく整備された道路を自律的に走行する機能である。
米フォード社(Ford Motor Company)は2016年8月、2021年までに完全自動のロボットタクシーの量産を開始すると、自信たっぷりに発表した。ハンドル、アクセル、ブレーキペダルを装備しないその車両を、ジオフェンス領域内の配車サービス用に提供するとのことだった。似たような希望を表明した企業は他にもあったが、その目標を達成しそうな企業は存在しない。完全自動運転車を迅速に展開したいという野心的な計画は、予期せぬ問題に遭遇している。例えば、停車中の消防車、白色の大型トレーラー、高速道路の中央分離帯だ(訳注:自動運転車がこれらを認識できずに衝突する事故が発生している)。
それでも自動運転は実現される。「ただし、誰もが期待していたものとは異なる」と、米ルミナー・テクノロジーズ社(Luminar Technologies)の共同創設者で最高技術責任者(CTO)を務めるジェイソン・アイヒェンホルツ氏(Jason Eichenholz)は述べた。自分専用のロボット運転手が、朝は職場まで運転し、昼間はずっとガレージで待機し、夜は自宅まで運転してくれることを期待してはいけない。そうではなく、輸送は、高度なロボットタクシーやトラックを呼び出すことによって受けられるサービスとなる。そうした車両は一台数十万ドルもし、一日中人や貨物を搬送することによって、その価格に見合った報酬を得る。5年以内に、そうした車両が自動運転の「レベル4」に達し(「自動運転レベル」を参照)、まずまずの天候下でよく整備された道路上を走行する場合は、乗客は「まったく運転に関与せずに」いられるようになると、アイヒェンホルツ氏は予測している。
進歩するも、完璧とはいえないレベル
この10年間で、自動運転車は大きく進歩した。アイヒェンホルツ氏によると、現時点で「99%の状況に対応する自動運転車を製造できるが、消費者が望むのは99.999%または99.9999%の状況に対応する車両だ」という。そのあと5、6ケタを達成するのは難しく、コストもかかる。晴れた日に脇道を走行するのと、吹雪が吹き荒れてカーブの多い高速道路上のすべての標識が見えにくい寒い夜間を走行するのとでは、雲泥の差があるためだ。現在試作されているロボットカーは、容易な状況には対応できるが、難しい状況には
対応できない。
今日の多くの自動車に、自動ブレーキ、車線逸脱防止、縦列駐車アシストといった運転支援機能が搭載されている。これらの機能は、一連のセンサと、保存地図からダウンロードされた情報や地域内の他の車両から送信された情報を拠り所とする。ドライバーを支援するために、それらの情報がコンピュータや人工知能(AI)ソフトウエアによって統合される。自動運転車はさらにその一歩先を行き、より多くのセンサとソフトウエアを搭載することによって、より多くの責任を負い、究極的にはドライバーの関与をゼロにする。
自家用車向けの最も高度な運転支援システムが、米テスラ・モーターズ社(Tesla Motors)の「オートパイロット」である。図 1は、その一連のセンサを示したものである。最も重要な役割を担うのが、カメラだ。フロントの狭角カメラは、前方250m先までをとらえ、メインの前方カメラは、150m先までをより広い角度でとらえ、前方に向けられた両側の魚眼カメラは、車両の進路に入ってくる可能性のある交通信号やその他の物体をとらえる。フロントのマイクロ波レーダは、160m先までの距離を測定する。後方に向けられたカメラは、両側に1基ずつと後部に1基の合計3基である。車両の周囲には、距離8mの超音波センサが12個取り付けられており、縦列駐車を支援し、衝突が生じないように監視する。
テスラ社のシステムに明らかに欠けているのが、ライダである。アイヒェンホルツ氏を含む多くの人々が、局所環境を記録するポイントクラウドを生成できるライダは必須、と考えている(図 2)。複数の種類のライダが開発されて、評価されている。しかし、テスラ社の最高経営責任者(CEO)を務めるイーロン・マスク氏(Elon Musk)は
2019年に、霧や雨の中を見通せないので、ライダは「無駄足であり不要でもある高価なセンサ」だと述べた。
その姿勢は、マーケティング戦略の決定的な違いを反映している。テスラ社は、オートパイロットを運転助手ととらえるハイテク好きの人が個人的に使用する、高級電気自動車を販売している。同社以外のほとんどの企業は、ハンドルを握らない乗客のための自動運転用に設計されたロボットタクシーを開発している。その他にも、エアタクシー(空飛ぶタクシー)、商用ドローン、工場/採掘/農業用システムなど、さまざまな自律型システムが開発されている。
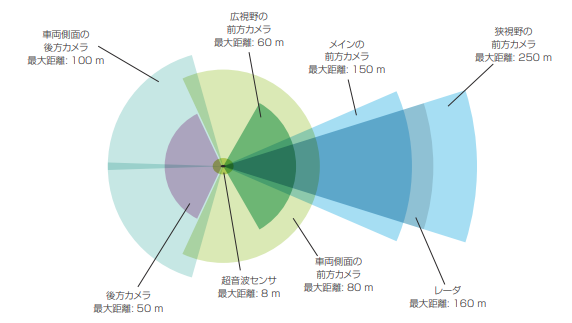
図1 テスラ社のオートパイロットで使用される一連のセンサ。
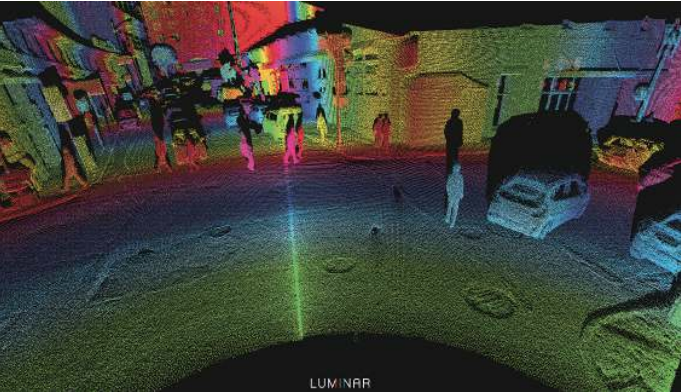
図2 ライダによって生成された都市部のポイントクラウド。(提供:ルミナー社)
自律走行のための新技術
どのようなセンサが必要であるかは、用途によって異なる。GPSは、位置情報の取得に広く用いられているが、誤った情報を示す場合がある。位置情報を改善するために、加速度計、磁力計、気圧計、チップスケールの原子時計を必要とするシステムもあると、米ドレイパー研究所(Draper Laboratory)の車載事業マネージャーを務めるサブリナ・マンスール氏(Sabrina Mansur)は述べた。自動運転車では、センサデータで更新可能なプリロードマップも使用される。センサは、歩行者や自転車が駐車車両などの陰に隠れている場合でもその位置を特定するための「機会、位置情報、軌道、速度の信号」として携帯電話をモニタリングすると、ドレイパー研究所で車載グループのディレクターを務めるエリック・バレス氏(Eric Balles)は述べた。
(もっと読む場合は出典元へ)
出典元
http://ex-press.jp/wp-content/uploads/2020/07/033-037_ft_future_photonics.pdf