
FMCWライダ:自動運転車の選択肢
周波数変調コヒーレントライダは、コンピュータが自動車を動かすために必要なデータをより多く集めることを約束する。課題は、コストダウンと性能改善である。
自律走行車開発の初期に、設計エンジニアは、905nmで出力するパルスライダシステムを選択した。テスト車両に組み込むために、そのようなシステムが市販入手可能だったからである。しかし、今日の905nmパルスライダには機械的走査の高コスト、太陽光や他の光源からの干渉、ライダの範囲を60 ~ 100mに制限するアイセーフティ出力制限といった重大な制約がある。網膜に安全な1550nm帯に移行することで、パルスは200 ~ 300mの範囲に十分な出力になる。また固体スキャニングの進歩でコストが低減するはずである。飛行時間(ToF)パルスレーザは、業界の主流であるが、それでもやはり、それらは真の自律走行車実現のための厳しい要件を満たせない。
現在、コヒーレントライダが自動車アプリケーション向けの競争に参入しつつある。主要アプローチは、周波数変調連続波(FMCW)ライダ、これは一部の自動車で安全付属品として現在、使用されている安価なFMCWコヒーレントマイクロ波レーダーの光版である。連続波動作は、現在、パルスレーザの範囲を制限している高ピーク出力の眼の危険を回避する。コヒーレント検出は、直接検出よりもはるかに高感度であり、性能は向上する。性能向上には、シングルパルス速度計測、太陽光や他の自動車が使用するライダを含む他の光源に対する耐性などが含まれる。とはいえ、FMCWは深刻な課題に直面している。
パルスとコヒーレントライダ
パルスライダは、単純なToF測距システムである。そのシステムは、放出短パルスと反射光の受信との間の時間を記録することで距離を測定する。また、その過程で、反射光の角度を計測することで対象物の位置を計測する。しかし、ライダでの速度計測は、マルチパルスの放出が必要であり、パルス間の距離の変化をパルス間の間隔で割る必要がある。動く車輌が多い環境でその時間が加わる。
コヒーレントライダは、対象物からの反射戻り光とコヒーレントレーザ送信器からの光を混合することで対象物を見つける。対象物がライダの方へ、あるいはライダから遠くへ動くと帰還信号がドップラーシフトする。したがって、それを局部発振と混合し、一度の観測で見通し線上の速度を直接計測する。パルスレーザと同様、帰還信号の角度は、送信器からの対象物の方向を計測する。ライダ戻り光と出力信号との混合で生成される中間周波数を解析することで対象物の距離を計測し、それを方向および速度と統合すると、速度ともに3次元的位置が得られる。「コヒーレント検出により、一層の信号処理をすると、さらに興味深いことができるようになる」と米ブラックモア社(Blackmore)の共同創始者・CTO、ステファン・クラウチ氏(Stephen Crouch)は話している。
FMCWライダは、連続レーザビームの繰り返し直線チャープ周波数によって距離を測定する(図 1)。一般に、チャープは、光が対象物に届くのにかかる時間よりも長い時間で増加し、次に対象物をスキャンするときに、そのビームを反射する。戻り光が局部発振器(LO)と混合するとき、コヒーレントディテクタがその信号を混合し、差周波数を計測する。これにより、反射光が対象物との間で往復している間に周波数がどの程度変わったかが分かる。その間隔とチャープ速度とを乗じると、距離が出る。さらなる処理によりドップラーシフトを抽出し、ライダに対する対象物の速度を得る。これは、自律走行車が、周囲を動き回る他の車輌の認識を維持するために重要である。
単独処理にとってコヒーレントディテクションの大きな利点は、それが、局部発振器信号とコヒーレントな光だけを増幅することである、と米インサイトライダ社(Insight LiDAR)の事業開発副社長、グレッグ・スモーカ氏(Greg Smolka)は言う。「ディテクタは、ライダビームとの干渉に戻る正確な一致を待ち受けている」と同氏は指摘する。その相互干渉光が、増幅されるものである。LOに一致しない光は検出されないので、太陽光、人工光、あるいは他の自動車のライダからのノイズを阻止することになる。それに対して、パルスライダはインコヒーレント(非干渉)光を選別して除外することがないので、戻り光と干渉する。
既存のFMCWライダは、100m程度のコヒレンス長に限定されている。つまり、その範囲は50m程度に制限される。これは深刻な制約である。60 ~ 100mの現在のパルスライダは、遅いペースで動き回る都市部のロボタクシー(robo taxis)には十分である。しかし、ハイウエイ速度で走る自動車は、衝突回避に間に合うように止まるには200 ~ 300mの範囲を必要とする。
その限界を克服するための取り組みは行われている。1つのオプションは、最先端の信号処理である。米カリフォルニア大バークリー校のテファン・キム氏(Taehwan Kim)によると、それはFMCWライダの範囲を10倍拡大するかもしれない。コヒーレントライダリターンは、レーザのコヒレンス長以内の対象物に対しては鋭いピークを生成するが、それを超えるとローレンツ形状に広がる(図 2)。そのようなライダリターンを従来の高速フーリエ変換で処理すると精度と感度が劣化するが、キム氏の報告によると、ローレンツ最小二乗フィッティングで、それらを処理することでコヒレンス長を超えても改善が得られる。目標は、FMCWライダ範囲をハイウエイの速度で使えるように拡大することである。
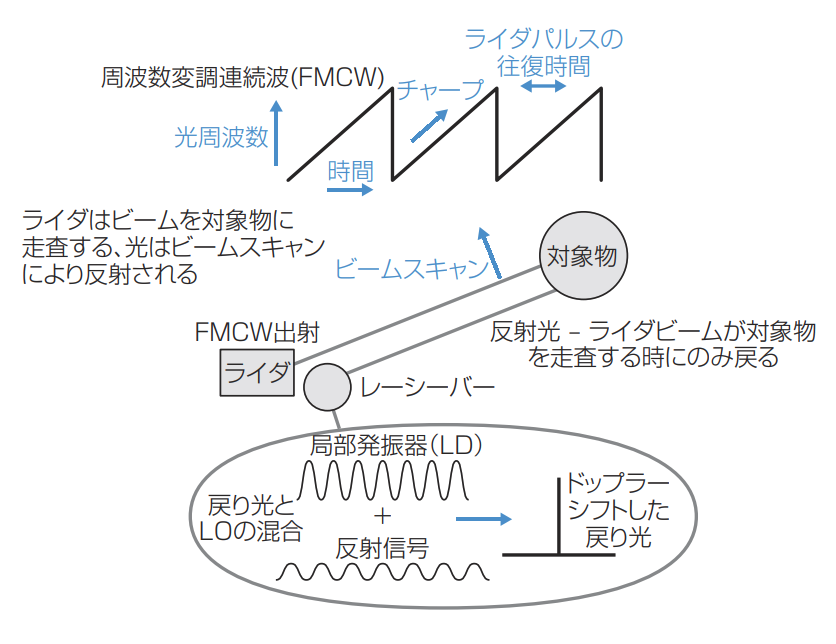
図 1 FMCWライダの出射レーザビームは、反復的に周波数チャープしている(上方)、各スキャンは、レーザ光が対象物まで往復するのに必要な時間よりも短い(中央)。連続ビームは、視界全体をスキャンし、一部がレシーバに戻り、レーザ送信器からの光と混合する。下部の差込図に見られるとおりである。
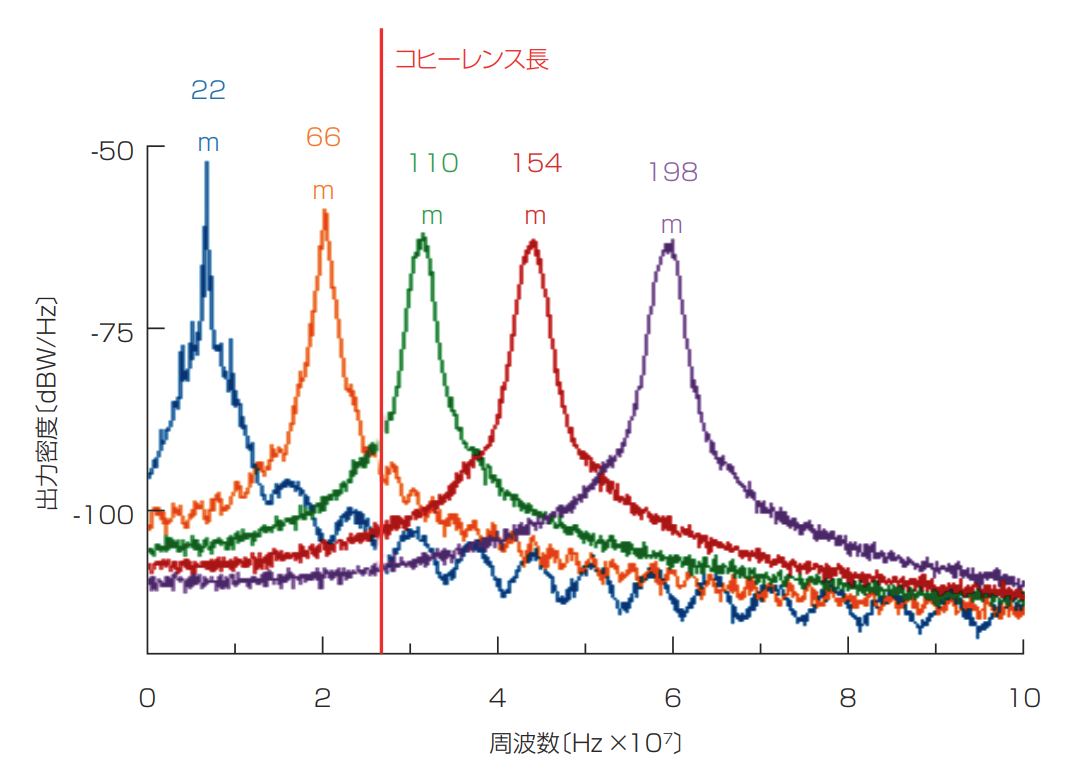
図2 ライダのコヒーレンス長以内で対象物から反射されたFMCWライダ光は、コヒーレンスレシーバに鋭いピークを生み出すが、コヒーレンス長を超えたところからの対象物は広がり、丸みを帯びたローレンツ(Lorentzian)ピークになる。(提供:テファン・キム氏、カリフォルニア大バークリー校)
(もっと読む場合は出典元へ)
出典元
http://ex-press.jp/wp-content/uploads/2019/07/ft_lasers-for-lidar.pdf