
TOF技術を導入するのに絶好のタイミング
3Dイメージング技術は数十年以上前からある技術だが、コンシューマーマーケットだけでなくマシンビジョンにおいても急速に発展してきた。高度なレベルのプロセス監視や自動化が求められるインダストリー 4.0化の動きや人間とロボットが共同で作業するような環境では、複雑な相互の位置関係を認識する必要があり、3Dビジョン技術導入が急がれている。この記事では、3Dイメージング技術の種類と、Time-of-Flight(光飛行時間測定、ToF)が現在最も有望視されている理由、さらにToFに特化した最新のCMOSイメージセンサの開発状況を紹介する。
3Dイメージングの概略
3Dイメージを取得するには、主に4つの方法がある。ステレオビジョン、ストラクチャード・ライトによる3Dイメージング、レーザ三角測量、そしてToFである。後ろの3つの方法は、“アクティブ”イメージング技術に分類されるもので、人工的な光源を使用する必要がある。
ステレオビジョン方式
ステレオビジョン方式では2台のカメラを設置し、物体を異なる視点から見た画像を取得する。キャリブレーション技術を駆使してカメラ間の画素情報を調整し、奥行き情報を抽出する。人間の脳が目視で距離を測るのと似た仕組みである。したがって、認知プロセスをシステムに組み込むのに膨大な計算処理が必要になる。
一般的なイメージセンサを使用したカメラを利用することでコストが抑えられる。ただし、センサの性能が良いほど(例えば、高性能なセンサや、グローバルシャッターなど)システムのコストは高くなる。2つのカメラの配置によっても距離測定範囲が制限される。距離測定範囲によっては、より大きなサイズのモジュールが必要になる。
さらに、この技術では照明の悪条件化や光の変化などではうまく測定できず、測定は物体の反射特性に大きく依存する。
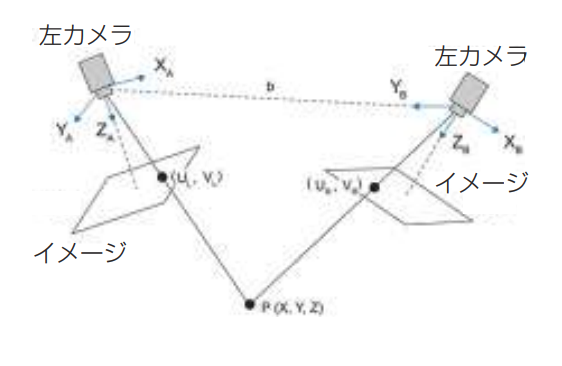
図1 ステレオビジョン方式。(画像元:Tech Briefs)
ストラクチャード・ライト方式
ストラクチャード・ライトによる方式では、あらかじめ定められたパターンの光を対象物に投影し、パターンのひずみ具合を解析して奥行き情報を取得する。フレーム時間の理論上の制約や動きによる被写体ぶれがなく、マルチパス干渉に対して影響が小さい。しかしアクティブな照明に合わせるために複雑なカメラが必要で、レンズとパターン投射器とを正確に安定させた位置に合わせる必要もある。屋外では、キャリブレーションの効果が失われるリスクや投影パターンが環境による光学的干渉の影響を受けやすいため、この方式は屋内使用に限定される。
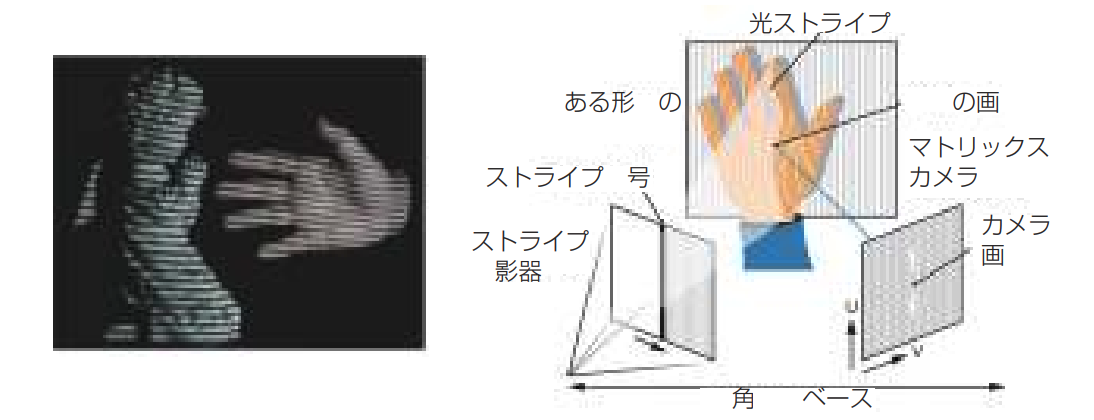
図2 ストラクチャード・ライト方式。(画像元:ケンタッキー大、レーザフォーカスワールド誌)
レーザ三角測量方式
レーザ三角測量方式では、物体の高さに関連づけられた光線の幾何学的なオフセット量を測定する。これは物体のスキャンに基づいた一次元のイメージング技術である。レーザ光が当たる物体表面までの距離に応じて、レーザドットがカメラの視野内の異なる平面で表示される。レーザドット、カメラ、レーザ光源が三角形をなすことから、この技術は三角測量と言われる。
一般的にこの測定には、高性能なレーザが用いられるが、これは変位と位置モニタリングの用途に高い精度、安定性、そして低温度ドリフトが要求されるためである。この方式のマイナス面としては、測定距離が近距離に限られること、環境光の影響を受けやすい、そしてスキャン用途に限られることが挙げられる。複雑なアルゴリズムやキャリブレーションも必要である。さらにこの方式は、表面が複雑な構造や形状をしている場合にも影響を受ける。
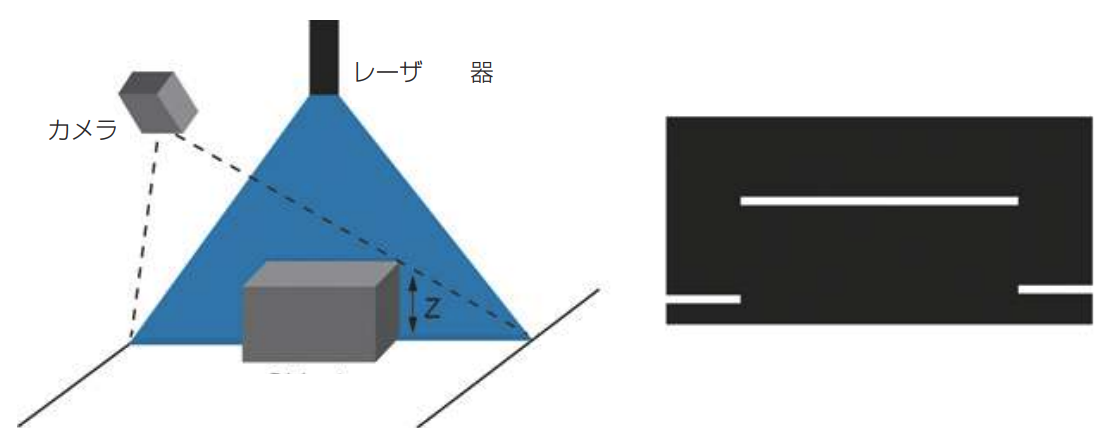
図3 レーザ三角測量法。
タイム・オブ・フライト(TOF)方式
距離測定時に、カメラと測定物の間で直接または計算によりフォトン(光子)の飛行時間の2倍の時間を求め、目的の距離を測定するすべての方式がこの技術にあたる。この測定には、直接ToF測定法(D-ToF)と間接ToF測定法(I-ToF)がある。直接ToF測定法の概念は単純だが、複雑な時間分解装置が必要である。一方、間接ToF測定法はよりシンプルな方法(光源をイメージセンサと同期させる)で動作する。まず光パルスをカメラのシャッターと同じ位相で照射する。フォトンの飛行時間の計算は戻ってきた光パルスの同期ずれ量を使用する。これにより、パルスの出射点と対象物との間の距離を推定できる。
この方式では、各画素における奥行きと強度を確実に直接測定できる。この画像は距離画像と呼ばれる。キャリブレーションは一度だけですむ。
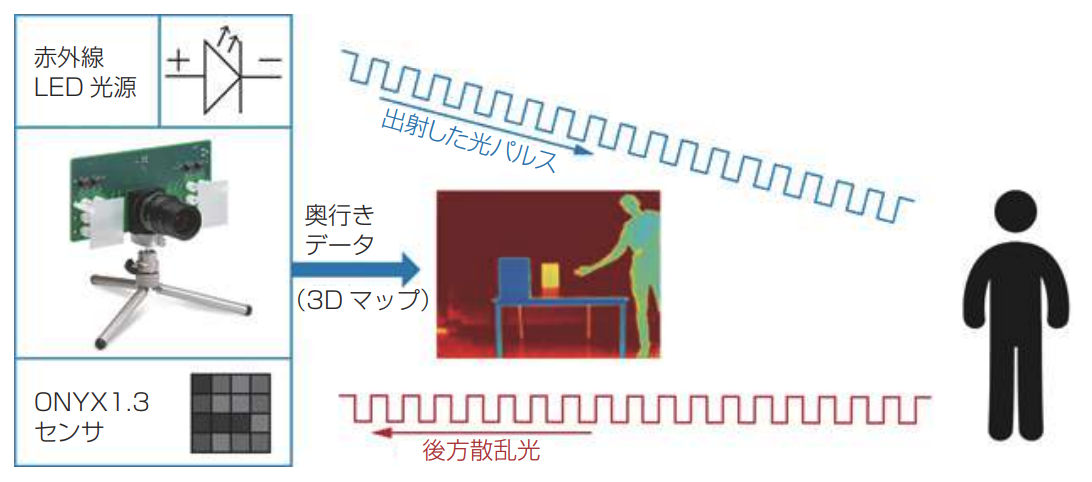
図4 タイム・オブ・フライト(TOF)方式の原理。
各測定方式の比較
各測定方式の長所と短所を表1に示す。現在利用されている3Dシステムはほんの少数で、主に3Dステレオビジョン、ストラクチャード・ライトカメラ、そしてレーザ三角測量に基づくものである。これらのシステムは固定の作業距離で動作するもので、特定の検出範囲でのキャリブレーションに多大な手間がかかる。
上記の問題点を克服したToFシステムは、アプリケーションの観点から見ればより多くの柔軟性を提供する。現状では、センサの画素の複雑さと消費電力の高さにより、市販品では画像の解像度がVGA以下に制限されている。
ToF用CMOSセンサソリューション
ToF技術の持つ広範囲なアプリケーションの可能性の広がりにより、テレダインe2v社は1.3MP(メガピクセル)の解像度、1インチの光学フォーマットを採用した最初の3Dソリューションを開発した。このソリューションでは、専用の高感度高ダイナミックレンジのCMOSセンサをベースにしている。
このアプローチにより、グレースケールの画像と奥行き情報の同時取得が可能になる。
・業界最高水準1.3MPの距離画像の解像度。精度は±1cm、しかも高速である。
・高速移動する物体の3Dイメージが測定可能。最大解像度で30fpsの距離画像取得が可能。
・広範囲の3D検出が可能。測定レンジは、0.5mから5mまで。90dBの高ダイナミックレンジ(HDR)を実現。
・可視および近赤外領域の高感度センサを搭載。850nmでの量子効率(QE)は50%、夜間/昼夜の測定にも対応できる高ダイナミックレンジ。
・埋め込みの3Dプロセッシング:マルチROI、2つのウィンドウ、ビニング、オンチップヒストグラムのデータコンテキストなどの機能がある。
1.3MPの解像度で奥行き情報を取得できる性能を評価するための評価システムが用意されており、距離画像、あるいはポイントクラウドフォーマットにデータを出力することができる。
このToF評価システムは、図5に示すように、コンパクトな1インチ光学フォーマットのボードカメラシステムで構成されている。ボードカメラシステムは高感度の1.3MPセンサをベースに光源、光学系が搭載され、マルチインテグレーション・オンチップ機能により、ToF原理による測定を1.3MPのフル解像度で実施することが可能である。

図5 ToF評価システム。(画像元:テレダインe2v社)
(もっと読む場合は出典元へ)
出典元
http://ex-press.jp/wp-content/uploads/2018/11/p32-35_ft_teledyne.pdf