
自動運転車市場向けのフォトニクスガイド
ライダとそれに競合するセンサ技術(カメラ、レーダー、超音波)によって、
センサフュージョンに加え、光検出器・光源・MEMSミラーを慎重に選択する
ことの必要性はさらに高まっている。
センサ技術、画像処理、レーダー、ライダ(LiDAR:light detection and ranging)、エレクトロニクス、そして人工知能の進歩によって、衝突回避、ブラインドスポットモニタリング(BSM)、車線逸脱警告、駐車支援を含む、数十種類もの先進運転支援システム(ADAS:Advanced Driver Assistance System)が実現されている。センサフュージョンを通じてこうしたシステムの動作を同期することにより、完全自律走行の自動運転車は、周囲をモニタリングして、道路障害物の可能性を運転者に警告したり、さらには衝突を防ぐための回避策を運転者とは独立して講じたりすることができる。
自動運転車は、高速走行時に前方の物体を区別して認識する必要もある。測距技術を利用して、最大約100mまでの範囲の3次元(3D)マップを迅速に構築し、最大250m離れた位置の高角分解能画像を作成しなければならない。また運転者が搭乗しない場合は、車両の人工知能によって最適な判断を行う必要がある。
これを行うための複数の基本的手法の1つは、自動運転車からのエネルギーパルスが対象物で反射して車両に返ってくるまでの往復ToF(Time of Flight)を測定するものである。大気中のパルス速度がわかれば、反射点までの距離が計算できる。パルスは、超音波(ソナー)、電波(レーダー)、光波(ライダ)のいずれでもよい。
この3つのToF手法のうち、角分解能の高い画像を得るには、ライダが最良の選択肢である。回折(ビーム分散)が小さいことから、隣接する物体を認識する能力がレーダーよりも高い(図1)。高い角分解能は、特に高速時に、正面衝突などの潜在的危険性に反応するための十分な時間を設ける上で重要になる。
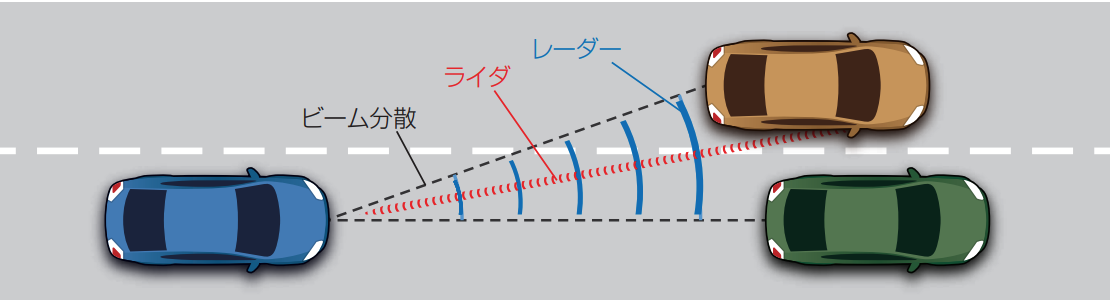
図1 ビーム分散は、放射アンテナ(レーダー)またはレンズ(ライダ)の波長と開口径の比率に依存する。ビーム分散の大きいレーダーの方がこの比率が大きいため、角分解能は小さくなる。この図において、レーダー(黒色)は2台の自動車を区別できないが、ライダ(赤色)は両者を区別する。
レーザ源の選択
ToFライダでは、レーザから持続時間τの光パルスが放射され、放射の瞬間にタイミング回路の内部クロックが起動される(図2)。対象物で反射した光パルスが光検出器に到達すると、クロックを停止する電気出力が生成される。こうして電子的に測定された往復ToFであるΔtから、反射点までの距離Rを計算することができる。
レーザと光検出器が実際に同じ位置にあるとすると、距離は次の式で求められる。
ここで、cは真空中の光速度、nは伝搬媒体の屈折率(空気の場合は約1)である。レーザのスポット径が、解像対象物のサイズよりも大きい場合、距離分解能ΔRに影響を与える要素は、Δtを測定する際の不確かさδΔtと、パルスの空間幅(w=cτ)の2つである。
最初の要素の影響はΔR= cδΔtで表され、2つめの要素の影響はΔR==で表される。分解能5cmで距離を測定する場合、これらの関係式からそれぞれ、δΔtは約300ps、τは約300psとなる。ToFライダでは、(δΔtの最大の寄与要因である)時間ジッタが小さい光検出器と検出電子部品に加え、比較的高価なピコ秒レーザなど、持続時間の短いパルスを放射可能なレーザが必要である。標準的な車載ライダシステムに使われるレーザは、持続時間が約4nsのパルスを生成するため、ビーム分散が最小限であることが不可欠となる。
車載ライダシステムを設計する際の最も重要な選択の1つが光波長である。人間の視覚に対する安全性、大気との相互作用、レーザの入手可能性、光検出器の入手可能性という、複数の要因がこの選択に制約を与える。
最もよく使われる2つの波長は、905nmと1550nmである。905nmの最大のメリットは、シリコンがこの波長の光子を吸収し、シリコンベースの光検出器は、1550nmの光を検出するために必要なInGaAs(インジウムガリウム砒素)の赤外線(IR:infrared)光検出器よりもコストが低いことである。しかし、1550nmのほうが人間の視覚に対する安全性が高く、パルスあたりの放射エネルギーがより高いレーザを使用できるという、光子数の面で重要な性質を持つ。
(あらゆる天候条件下での)大気減衰、空中浮遊粒子による散乱、対象物表面からの反射は、波長に依存する。天候条件や反射面の種類には無数の可能性があるため、これは、車載ライダにおける複雑な問題である。ほとんどの現実的な設定の下で、905nmのほうが光損失が低い。905nmよりも1550nmのほうが水に対する吸収率が高いためである(1)。
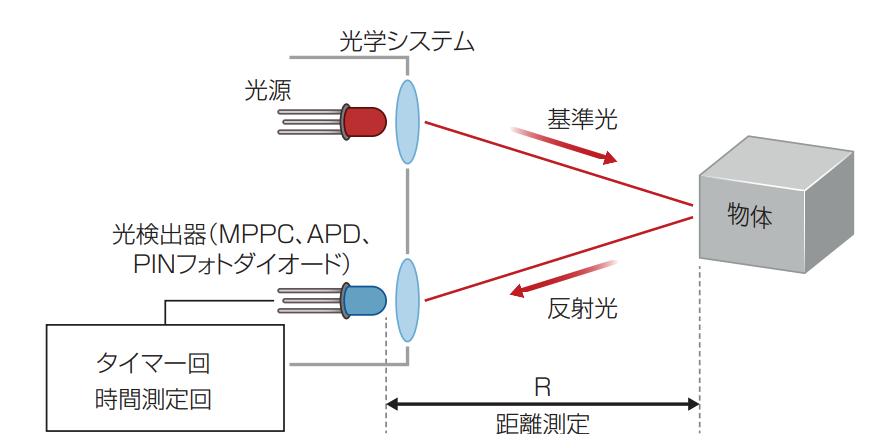
図2 ToFライダの基本設定の詳細図。
光子検出の選択肢
光検出器のアクティブ領域に到達するのは、1つのパルスで放射される光子のうちのほんの一部である。大気減衰がパルスの経路に沿って変動せず、レーザ光のビーム分散が無視でき、照射スポットが対象物よりも小さく、入射角がゼロで、反射がランバート反射である場合、受光ピークパワーP(R)は次の式で求められる。
(もっと読む場合は出典元へ)
出典元
https://ex-press.jp/wp-content/uploads/2018/01/ft4_lidar.pdf