
ライダシステムのレーザ源選択を左右するアプリケーションパラメータ
ライダ用レーザに、汎用型というものは存在しない。システム設計者は、レーザ源の選択を試みる前に、対象用途の実環境と性能目標を理解する必要がある。
自律走行車業界を対象にライダ(LiDAR:light detection and ranging:光検出と測距)システムやコンポーネントを製造するメーカーのM&A(合併買収)が活発に行われているが、他の業界もこのライダの活況に加わりつつある。
「農産業では、地形マッピングと、農家に対する肥料と農薬の選択的流通方法の指導にライダが利用されている。生物と保全の分野では、ライダによって森林樹冠の高さや森林破壊の監視が行われている。軍事業界では、自律走行車やドローンの誘導、潜在的な目標の識別、戦術の正確なマッピングにライダが用いられる。そして採鉱業界では、ライダによって採掘領域のマッピングと除去体積の判定が行われる」と、米RPMCレーザーズ社(RPMCLasers)の米国西海岸セールスマネージャーを務めるショーン・スミス氏(Shawn Smith)は述べる。「測量では、ライダによって今後の開発に向けた建物と周辺領域のマッピングが行われており、大気観測用ライダシステムは、エアロゾルや微粒子の3次元分布をマッピングして、汚染から雲や風、さらには火山噴出物にいたるまで、あらゆるものの特性評価を行う(図1)」。
ライダシステムは、対象領域にパルスレーザ光を照射し、反射信号が受信器に戻るまでの時間を測定する。ライダシステムには、レーザ源または送信器、感度の高い光検出器または受信器、
同期とデータ処理を行う電子部品、そして、3Dマップや近接データを作成するために高精度レーザ走査を行うモーション制御装置または固体MEMS(microelectro mechanical systems)に基づくコンポーネントが装備されている。
これらの必須コンポーネントのうち、全体的なシステム性能を左右するのはレーザそのものだとスミス氏は指摘する。「例えば、レーザビームの品質と広がり角によって、マッピングライダの縦横方向分解能(x、y)が決まり、短パルス持続時間とタイミングジッタによって、前後方向精度(z)が決まる。パルスエネルギーは、遠距離を確保するための主要パラメータで、パルス繰り返し周波数が高ければ、高速走査と高いデータスループットが達成できる」とスミス氏は述べる。
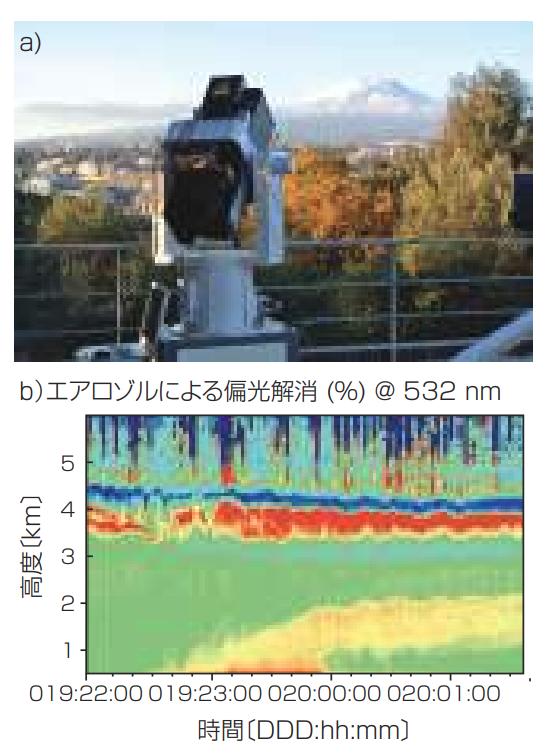
図 1 多波長ライダシステムAMPLE(Aerosol Multiwavelength PolarizationLidar Experiment)は、エネルギー 4mJ、繰り返し周波数1 kHz、パルス持続時間1nsで、個々に指定可能な3つの出力チャンネルを備え、355、532、1064nmのレーザを使用して、エトナ火山からの噴出物を観測する(a)。AMPLEによって測定されたエアロゾルによる偏光解消の時系列変化(b)を用いて、地上から6kmまでの範囲の鉱物粉末が観測される。(提供:伊ALA s.r.l.社)
性能に関する検討事項
「高ピーク出力(数十キロワットから数十メガワット)のパルス(ナノ秒範囲)固体レーザは、何十年も前からライダに用いられてきた」とスミス氏は述べる。「サイズと重量、コスト、消費電力、液体冷却、衝撃と振動に対する感度、そして過酷な環境を理由に、モバイル、航空、宇宙の分野におけるライダ装置の普及は抑えられていた。しかし、伊ブライト・ソリューションズ社
(Bright Solutions)などの企業は最近、ピーク出力が高く、ナノ秒未満で動作し、空気冷却または伝導冷却を採用する、新世代のQスイッチ固体レーザを開発した。このようなレーザは、上述の制約を取り除き、紫外域(UV)から近赤外域(nearIR)までの広範囲にわたるレーザ波長を提供する」(スミス氏)。
航空地形マッピングには一般的に、約1μmの波長が用いられる。その波長により、アイセーフと考えられるだけの広域にビームが拡散される。深浅測量(海底や沿岸地域の高解像度マッピング)には、高エネルギーで周波数を2倍にした532nmのレーザ源が用いられることが多い。緑色の波長は、純水の透過率の高さと海底微粒子からの後方散乱の低さの間のバランスが最適だからである。
スミス氏によると一般的に、532nm ~1μmの波長は、コストと消費エネルギーの面でメリットがあるが、比較的遠距離に到達する必要があることから、クラス1のレーザ安全基準を超えるレベルにまでレーザ出力が容易に増加する可能性があるという。そのような場合、アイセーフティを確保するための規制に準拠して、許容される直径にまでビームを拡散しなければ(それにはシステムサイズの拡大が必要となる)、レーザ照射は目に危険を及ぼす恐れがある。
本質的にアイセーフなレーザは、民生および商用用途向けの高性能小型ライダにおいてますます普及している。アイセーフな波長として、約1.5μmで照射するIRレーザは、地形マッピングや障害物回避のように、固体物体を検出する必要がある場合に選択されることが多い。一方、約355nmまたはそれ以下のUV波長は、大気中微粒子からの後方散乱係数が比較的高いことが求められる、アイセーフな大気観測用ライダシステムにおいて、最適な選択肢である。
波長の他に、パルス持続時間についてはどうだろうか。「理想的には、ミリメートルからセンチメートルの垂直測定分解能を達成したいとライダ設計者は考えるので、短パルス持続時間を
検討する必要がある。しかし、数ピコ秒レベルの非常に短いパルスでは、レーザスペクトルと受信器帯域幅が広くなってしまうので、信号雑音比(SNR:signaltonoise ratio)が低下する」とスミス氏は続けた。一方、パルスが1nsよりも長いと、ノイズは低くなるが分解能が低下するため、パルス持続時間を数百ピコ秒程度(またはナノ秒未満)にするのが、高い垂直方向精度と信号雑音比を得るための最適なトレードオフになると、スミス氏は言う。
ライダ用レーザに関しては、汎用型というものは存在しないことを示すために、以下では、自律走行車と森林樹冠マッピングという、まったく異なる2つの応用分野について解説する。
自律走行車用のライダ
米ABIリサーチ社(ABI Research)の最近の調査によると、自動車向けに販売されるデバイスの数は、2026年には6900万個に達する見込みだという(1)。仏キオプシス・グループ社(Keopsys Group)のフレデリック・シケ氏(Frédéric Chiquet)、R&Dマネージャーのギヨーム・カナ氏(Guillaume Canat)、最高経営責任者(CEO)を務めるマーク・ル・フロイック氏(Marcle Flohic)が説明しているように、自律走行車用のライダシステムには主に、3Dフラッシュライダとスキャニングライダの2種類がある。
フラッシュライダでは、広角照射源と広角光学系(魚眼レンズなど)を使用して、1回の照射で取得した後方散乱光をマトリックス検出器に集光することにより、車両の周囲領域のモデル化に必要なすべてのTOF(Time Of Flight)データを取得する。一方、スキャニングライダは、ライン単位で3D環境を構築する。光を各方向にシーケンシャルに照射し、対応するエコーを検出器によって1つずつ検出する。目に安全なレーザ源は、パルスモードで動作すること、暗い色の服を着て100m先を歩く歩行者を検出できるだけの強度を備えること、−40 ~ 85°Cの温度で動作すること、10cmの測定距離精度に対応するパルスを照射することが求められる。
多くのライダで、半導体レーザに基づく光源が採用されているが、非冷却のファイバレーザを使用するものもある。非冷却のファイバレーザは、高出力ビームを分割し、光ファイバを利用
して複数のセンサ位置にルーティングできるなど、パルス半導体レーザに勝る多数のメリットを備える(図2)。主発振器出力増幅器(MOPA:Master Oscillator Power Amplifier)構成をとることにより、標準的な1550nmのライダファイバレーザで、10 ~ 15kWおよび200 ~ 300Wの出力レベルで、それぞれ5 ~ 250kHzのパルス繰り返し周波数を持つ。
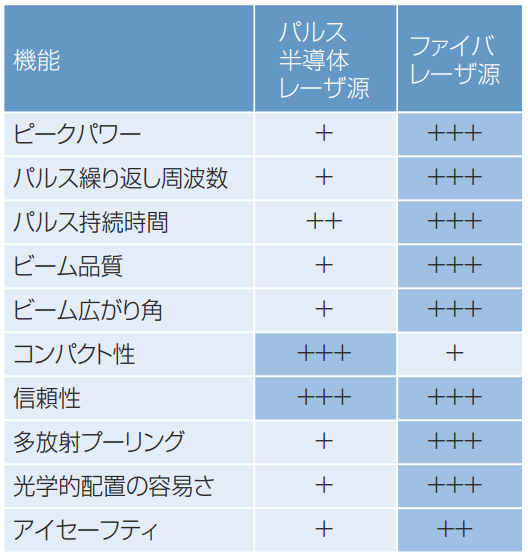
図 2 自律走行車用ライダを対象とした、パルス半導体レーザ源とファイバレーザ源の比較。(提供:キオプシス・グループ社)
(もっと読む場合は出典元へ)
出典元
https://ex-press.jp/wp-content/uploads/2017/05/LFWJ1705_FT1.pdf