
圧電式ヘキサポッドモーションシステムによる、手ぶれ補正と画像解像度の改善
光学エンジニア向けに提供されている高速機械式システムは、画像解像度と手ぶれ補正を改善するとともに、光学系、制御系、アルゴリズムの全体的な有効性を試験するために多軸モーションをシミュレーションする手段を備える。
さらに高い解像度で画像処理を行うために、モーション制御装置の光学設計者やメーカーには、物理的な制約を克服することが求められている。民生カメラ市場における最大の目的はまだ、画素数を上げることにあるようだが、科学的分野では状況は異なる。感度と解像度の間にはトレードオフがあり、大気や流体中の振動や揺らぎなどの乱れは、特に低光量の条件下において、画質を低下させる。
画像ディザリング手法と、精密機構やモーション制御に基づく能動的な手ぶれ補正(画像安定化)は、デジタル画質を改善するための現代的な手段である。精密モーション制御は、試験装置においても重要性を増しつつある。このような装置では、車両の振動や、人間の筋肉系に起因するカメラのぶれなど、さまざまな環境をシミュレ-ションするヘキサポッドプラットフォーム上で、記録済みの振動シーケンスを6次元のモーション軌跡として「再生」することが行われる。
モーション制御による画質
CMOS(Complementary Metal Oxide Semi conductor: 相補型金属酸化膜半導体)チップやCCD(Charge Coupled Device:電荷結合素子)チップなどのデジタルイメージングセンサにおいて電気的ノイズが問題にならない場合、画質は最小限のコストで大幅に改善することができる。しかし、実世界では、光子数が少ないと、S/N比(signal-to-noiseratio:信号対雑音比)が望ましくないレベルになり、天体観測から顕微鏡検査にいたるまでの画像処理が困難になる。非常に感度の高い検出器は必要な解像度を備えず、最も解像度の高い検出器は感度が低い。その結果、細部が欠けるか、露光時間が長くなって画像が過度にぶれるかのいずれかが生じる。
デジタル画像記録手法の解像度は、主にセンサのピクセル数によって決まり、これを高めるには、面積(センサのサイズ)を大きくするか、ピクセルサイズを小さくするかのいずれかが必要になる。残念ながら、前者には異なる画像処理光学系が必要で、後者の場合は、ピクセルサイズに応じて光感度が低下するために信号が低下してしまう。
しかし、蛍光顕微鏡、白色光干渉計、光干渉断層法(OCT:Optical Coherence Tomography)、または、監視カメラや航空撮影用カメラなど、さまざまな応用分野の画像解像度を直ちに向上させることのできる機械式モーション制御システムに基づく手法が存在する(図 1)。
モーション制御ハードウエアとソフトウエアアルゴリズムの両方を使用することにより、画像解像度を比較的容易に大幅に改善することができる。さらに、これらの機械式手法では、ジッタや振動を伴う難しい環境のシミュレーションも可能で、画像処理の解像度と品質を高める手ぶれ補正手法の開発に役立てることができる。

図1 建物の航空画像。右側は手ぶれ補正と高解像度化を適用した場合、左側は適用しない場合(提供:PI社)。
圧電アクチュエータ:速度と解像度
小さなパッケージで高い精度、速度、力が求められる用途に対し、特殊な形の圧電(ピエゾ)アクチュエータが広く用いられている。逆圧電効果に基づき、圧電セラミックディスクは電界を印加すると膨張し、それによってアクチュエータが動く。このような圧電システムをOEM設計者にとって扱いやすいものにするために、メーカーは、アクチュエータを屈曲構造の内部にパッケージングすることにより、精密なガイダンスとモーションの増幅を達成するとともに、シンプルな搭載インタフェースを実現している。
屈曲構造は通常、アルミニウム、鋼、またはチタンでできている。屈曲構造でモーションを増幅することにより、ナノメートルレベルまでの解像度で、一般的に最大2mmの移動範囲が達成可能である。能動的なセラミック要素の剛性が高いことから、ダイナミクス(加速と停止をすばやく行う能力)に優れており、走査周波数を最大で数kHzにすることができる。
圧電アクチュエータは摩耗することがなく、潤滑油が不要で、磁界を発生せず、真空に対応する。摩擦や摩耗がないため、保守なしで数十億サイクルの使用が可能である。独フィジック・インスツルメンテ社(PI:Physik Instrumente)が提供するセラミックに封入さ れ たPICMAアクチュエータは、NASA・JPLによって寿命試験が行われ、故障することなく1000億サイクルの使用に耐えた。同製品は、マーズ・ローバー(Mars Rover:火星探査車)のサイエンスラボ(MSL:Mars Science Lab)で、4年近くもの間稼働し続けている。
ただし、屈曲構造で増幅を行う圧電アクチュエータは移動範囲が大きくなる代わりに、代償が伴う。増幅率を上げると、剛性と応答性がともに低下する。それでも、適切に設計された圧電屈曲アクチュエータならば、ステップアンドセトル時間を1ミリ秒未満と、他のどの従来型アクチュエータよりも格段に高速にすることができる。また、屈曲構造に搭載すれば、圧電アクチュエータによって多軸モーションを提供することができる。例えば、ハイエンドなカスタムカメラに搭載して、ピクセルサブステッピング(ステップ幅を1ピクセル未満とする)の原理に基づいて、手ぶれを補正したり、解像度を高めたりすることができる。
ピクセルサブステッピング
ピクセルサブステッピングを画像処理システム内で適用すると、センサの記録領域が、1ピクセル未満のステップ幅で、定義されたパス上を定義された周波数で移動する。移動距離がピクセルサイズよりも小さいこのディザリングにより、ピクセルは記録領域上に複数回露光されることになり、実質的に「ピクセル乗算器」が形成されて、解像度を大幅に高めることができる(図 2)。データ処理を加え、この方法で生成された多様な画像を重ね合わせることにより、最終的な高解像度画像が形成される。この過程は、超解像画像処理としても知られている。
この手法はモーションに基づくため、機械的精度と寿命に関するすべての性能基準を満たす機械式ドライブが必要になる。ドライブは応用分野によって異なるが、すべてにおいて重要な機能は共通している。つまり、センサチップのモーションが十分な線形性を備えて2次元で再現可能であること、そして、移動距離がピクセルサイズ程度(数十マイクロメートル以下)であることだ。
必要なダイナミクスは、静止画像の場合で数Hzから、動画を録画する場合で最大kHzレベルまでと幅広い。例えば、指紋によって人間を識別するために用いられる高解像度のCCD /CMOS生体スキャナの基本要件は、走査周波数が1~5Hz、応答時間が1ms未満である。ドライブの移動距離は5~15μm、最小搭載面積における精度は0.5μmよりも高くなければならない。
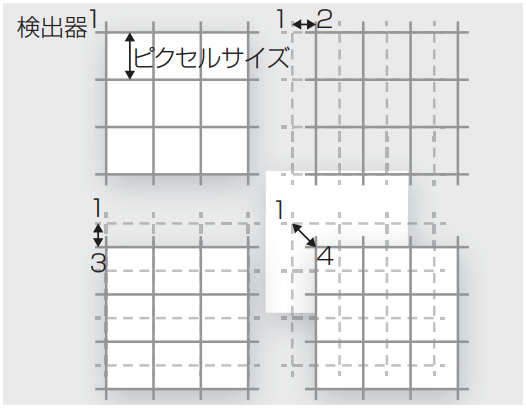
図 2 ピクセルサブステッピングによって画像解像度を高めることができる。検出器チップを、ピクセル幅の半分の単位で、水平、垂直、対角方向に移動させると、4つの異なる画像が生成され、それらを処理することによってより解像度の高い画像を形成することができる(提供:PI社)。
天体観測/顕微鏡検査の応用分野
圧電駆動の高速走査デバイスは、天体観測や顕微鏡検査の分野の画像処理も改善することができる。天体観測の分野では、アクティブミラー(チップ・チルトモーション)やアダプティブミラー(複数のアクチュエータで鏡面を変形)によって、空間分解能が1ケタ以上改善されている。
最新式の望遠鏡は、巨大な主鏡によって集光する。鏡が大きいほど、多くの光子が収集される。ハワイのマウナケア山に設置されているすばる望遠鏡は、主鏡の直径が8.3mにもわたる。光は、それよりも小さな複数の鏡に送られ、最終的にイメージング検出器に到達する。
(もっと読む場合は出典元へ)
出典元
https://ex-press.jp/wp-content/uploads/2017/01/LFWJ1701ft4.pdf