
衝撃に敏感な機器用の電空式振動絶縁
機械的な位置/振動制御方式に比べて、電空システムは、短い整定時間で作業面の振れを最小化し、低エネルギー消費で6自由度の位置制御を磁気・熱影響なしに提供する。
精密さと正確さに対する要求にもよるが、振動は生産または測定結果の品質を低下させる。精密さに対する要求が高まったら、振動制御システムの効率も同様に高めなくてはならない。電空式位置制御は、さまざまな産業界で使われている、極めて動的で衝撃に敏感な機器を振動から高効率で絶縁する。
電空式位置制御
2013年秋に米ビルツ・バイブレーション・テクノロジ社(Bilz Vibration Technology)が商品化した電空式位置制御(EPPC)システムは、機械支持体または支持プラットフォームの下に直接取り付けることができる低固有振動数のメンブレン式空気ばねアイソレータを使用している。リアルタイム・レベル制御システムと同様に、2チャンバメンブレン式空気ばねシステムの設計は負荷ボリュームと減衰ボリュームからなる(図1)。両ボリュームは調整可能な機械式バイパス弁で接続されている。この要素上の絶縁されたマシンのいかなる振れも、負荷ボリュームのサイズを変化させ、その結果として1つの空気ボリュームから他へとバイパスを通って流れる空気の量を変化させる。
バイパス内部の空気摩擦によって、エネルギーは熱に変換され、最大20%減衰(D)する。既定の空気ばねの固有振動数は垂直方向で約1.1から2.5Hzの範囲であり、水平方向では約2.5Hzである。
減衰係数Dを考慮するならば、任意の振動絶縁システムの効率は励起周波数とアイソレータの固有周波数との間のマッチング率ηに大きく依存する(図2)(1)。一般に、防振効率はアイソレータの固有振動数が下記の式に従って低下するのに伴って高くなる。
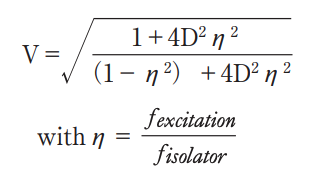
一般に、システムは、マッチング率ηが√2を超えると防振機能を果たす。マッチング率が√2よりも小さい場合には、共振によって振動増幅が起きる。通常の目標はη=3〜4を達成することである。η=3は最小の実効目標値(絶縁効率にして約80%)であり、η=4は経済的な限界である(2)。
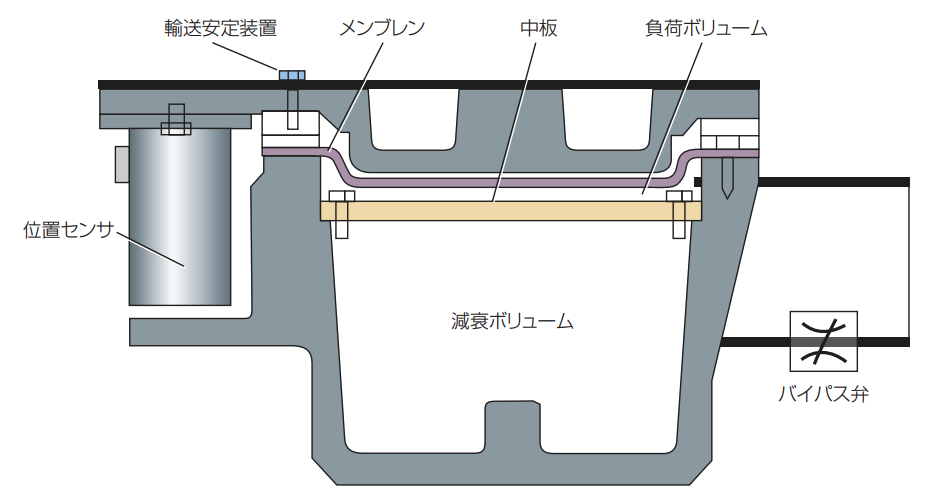
図1 電空式位置制御(EPPC)振動制御システムは、位置センサを備えたメンブレン式空気ばねアイソレータからなる(断面で示す)。
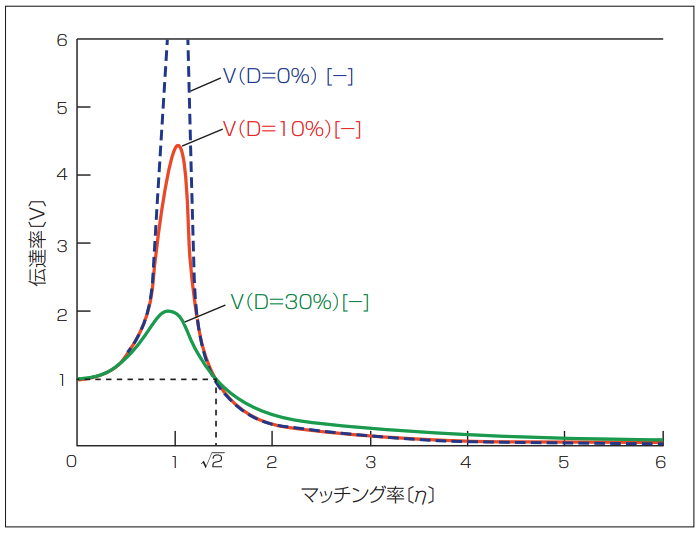
図2 振動アイソレータの伝達率は減衰率と、励起周波数とアイソレータの固有振動数との間のマッチング率ηに依存する。
空気浮上
空気ばね技術は、鋼ばね、電磁アクチュエータ、リニアモータなどに比べて多くの利点を有する。空気ばねは、空気圧と負荷容量との間に線形関係があるため、非常にフレキシブルで、さまざまな負荷分布に容易に適合しうる。実際には、空気ばね要素内部に適用される空気圧は一般に4〜6バールであり、これは最大15.5トンの要素あたり全負荷容量に相当する。
空気ばねの機械的特性(剛性と固有周波数)は妥当な動作範囲内でほぼ一定になる。また、空気ばねは非常に高い機械的安定性を提供し、追加の減衰要素を必要としない。さらに、非常に低いエネルギー消費が発熱や磁気変動を最小限に抑える。
用途によっては、EPPCレベリングシステムは、いくつかのコンポーネントを必要とする(図3)。空気ばね要素に加えて、オペレータ用の様々な状態インジケータ(システムステータス、エラーフラグ、動作完了信号)を備えた制御ユニットも標準イーサネットを介してシステム構成、監督、システム監視向けに接続することができる。
空気メンテナンスユニットは、電子式圧力スイッチ、システム空気圧の制御、調節、調整用の遮断弁、圧縮空調用フィルタの組み合わせ(5μmと1μm、ISO 8573-1:2010クラス2.3.2に従って必要な空気の質を調整)、吸音材による雑音低減を含む制御放出用の収集排気などを介して空気圧モニタリングを実行する。
高精度のサーボ弁は、60MHzで動作する16ビットのデジタル信号プロセッサ、PIDコントローラによる統合レベル制御、0.76μm(位置)および0.36ミリバール(圧力)の解像度を持つ14ビット分解能アナログ・デジタル(A/D)変換器、CAN-Bus接続(1 Mボー)、および300Hzの最大動作周波数を含む。最終的に、電子レベルセンサ(ポテンショメータ)によって12ミリメートルあたり1000ケタが得られる。

図3 全EPPCシステムは、制御されるシステムに応じて再構成およびカスタマイズされる多数の振動絶縁コンポーネントからなる。
(もっと読む場合は出典元へ)
出典元
https://ex-press.jp/wp-content/uploads/2014/10/fea1_LFWJ201409-41.pdf