
ライダの進歩が自動運転車両の成功を促進
ライダ(lidar)は、自動運転車輌を安全に走らせるための要求精度に対応している。面発光レーザ(VCSEL)を使った半導体レーザベースのフラッシュライダシステムは、コストを下げ、可動部品を除去することで商用化と普及を促進する可能性がある。
自動運転車両では、レーダー、ソナー、ビデオ処理は、それぞれに限界があるので、それらが協働することになる。レーダーとソナーは、物体の位置決め精度や空間分解能が不足している。これらの点は、ソフトウエアで制御される判断の一層の向上に必要となる。カメラは、環境要素に制限される。例えば、太陽光の明るい閃光、夜間の条件あるいはトンネルなど。その代わりに、光検出と測距(ライダ)は正確で高い空間分解能のデータを提供し、映像センサの飽和、低分解能のレーダー反射、不明瞭な場合には、ライダはフィードバックシステムになり得る。
自動車業界はより高いレベルの自律性を追求しなければならなく、これは自動車メーカーやコンポーネントサプライヤーへの自動車用ライダの普及促進になる。ライダ、レーダー、ビデオの統合が、自動運転車両を可能にするのに必要なセンサの最終的なソリューションになるという意見の一致が専門家の間で広がりつつある。
現在、DPSSもしくはファイバレーザや機械式スキャニングシステムを使用するライダシステムは高性能であるが、高コストでもある。それらは、簡単にはコスト削減できそうにない。したがって、コストを下げ、デバイスサイズを縮小しながら、急速にパフォーマンス向上を進めることはできない。
レーザ、カメラと3D点群
プロセッサが、ドライバー支援および自動運転車両に必要な瞬時の判断ができるようになるには、対象の特定、運動ベクトル、衝突予測と回避策によりセンサパッケージが正確な3D情報を提供しなければならない。
ライダは、ディテクタの応答に合わせた、高速、ハイパワーパルス光を利用してこの情報を提供し、反射光から対象物までの距離を計算する。この3D情報の分解能を向上にディテクタアレイもしくは動作タイミングを設定したカメラを使うことができる。パルスの速度は、深さ方向分解能の決定に重要である、また結果として得られたデータは3D点群集計に使用される。3D点群は、高速処理アルゴリズムで解析され、データをボリューム識別子やベクトル情報に変換する。これらは、衝突確率を判定するために、車が進む位置、スピード、方向に関連づけられている。
車載コンピュータは、つまりは、人と車、速度、方向の3Dアクションムービー(映像)のモデリングを行っている。その同じムービーに、ライダデータからの対象物を持ち込み、未来がベクトル射影によって計算されるゲームに対象物が関わってくる。このゲームは、ソフトウエアアルゴリズムを通したベクトル診断や予測行動を評価する早期警戒システムを構成する。
現在のライダ技術
自動走行「グーグルカー」の屋根に搭載された円筒形スキャニングライダはますますよく見られるようになっている。そのような回転ミラーシステムは高性能であり、これまでに一次テストと開発プラットフォームを自動運転車両でのライダ利用に提供してきた。このタイプのシステムから、車の車体パネル内に収まるような低コストでコンパクトなライダシステムに移行するために、開発者は多くの代替策を検討している。
より小さなスキャニングミラーシステムは1つの代替策だ。別の選択肢は、MEMSベースのスキャニングライダである。これらのスキャニングシステムは、立体角の小開口から十分な出力を持つ高輝度レーザを必要とする。これによって長い到達距離を得るための高い放射強度が得られる。そのような高輝度の光源は、ハイパワー端面発光半導体レーザダイオードか固体レーザのいずれかでなければならない。高輝度レーザビームにはアイセーフが維持されている、これは低いデューティサイクルパルスとFOVをスキャンするビームの動きによるものである。
ハイパワー高速フラッシュライダ
より安価で小型のライダを製造するために、OEMの中には、高輝度光源や機械式動作から重点を移そうとしているところもある。急速に成熟してきた焦点面アレイを利用して時間を設定したFOV照射がターゲットになっている。このライダ技術は、「フラッシュ」ライダとして知られており、そこでは高速のパルスレーザが「フラッシュ」し、タイマーを動作させる。それによって焦点面アレイの各ピクセル、あるいは時間設定したカメラが赤外光に応答するのにかかる時間をカウントする。
フラッシュライダによって、個々のピクセルから対象物までの正確な距離が計算され、3D深度のマップが作成される。マップは、ビデオ画像シーンや他のセンサと統合され、周囲環境の完全評価を提供する(図1)。ライダシステムの複雑さ、サイズ、コストを抑制するために、このアプローチを達成しようとしているところが数社ある。フラッシュライダの変種も開発されており、そこではたくさんの、より小さなFOVを利用して、レシーバの複雑さを軽減しようとしている。
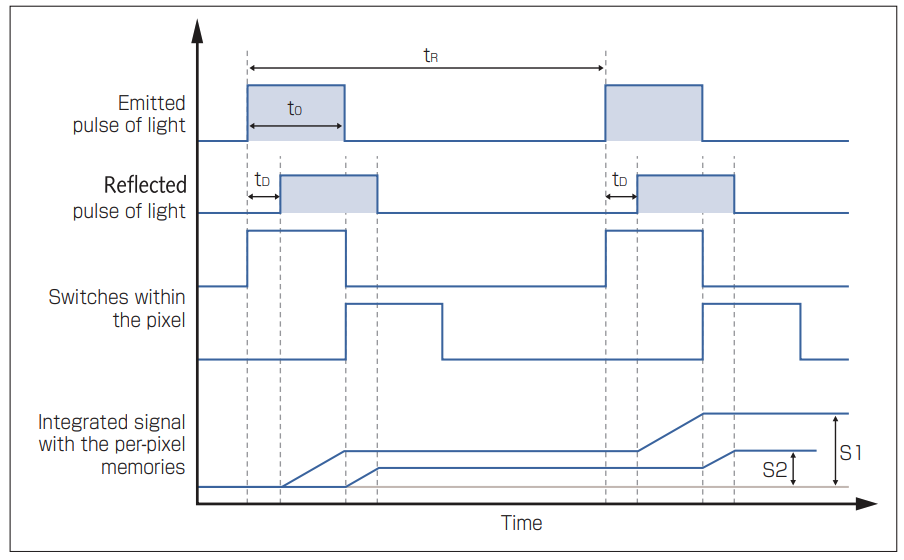
図1 フラッシュライダタイミング概念の説明。レーザパルス、反射光、カメラやディテクタ内のスイッチのシンプルなタイミングを説明している。
(もっと読む場合は出典元へ)
出典元
https://ex-press.jp/wp-content/uploads/2015/07/LFWJ1507_photonics_applied.pdf