
実用化が進むライダ
ライダシステムに基づく自律型アプリケーションの急速な増加が続くにつれて、基準の策定が有益であることが明らかになると予想される。
光検出と測距(light detection and ranging:ライダ)は最近、土地測量、農業、採鉱など、ますます多くの分野にこの技術を適用する、システムメーカーの多大な関心を集めている。しかし、最も大きな関心を集めているのは自動運転車であり、その理由はもっともである。レーザ、スキャナ、特殊なGPS受信機の組み合わせによって、さまざまな物体の位置をすばやく測定できる点において、この技術は自動運転に理想的に適合する(図 1)。
ライダシステムを装備した自動車が大都市の道路を行き交うというのが、未来の構想である。しかし、まだ全くその域に達していないのは明らかだ。既存システムはかなり大きく、より洗練されたパッケージを提供できるようにすることが、継続的な課題となっている。
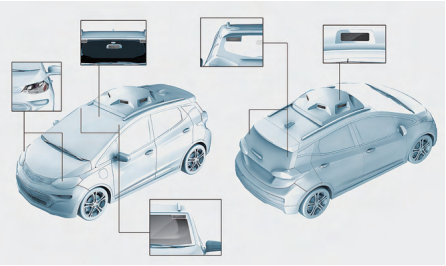
図1 自動運転車用ライダの開発者は、センサや高解像度カメラを含むシステムを、シームレスかつコスト効率よく統合する方法を模索している。図に示されているのは、モジュール型プラットフォーム「4Sight」で、エイアイ社によるとそのような統合が実現されているという。(提供:エイアイ社)
自動運転の課題と路上の障害物
自動運転技術が進化し続ける一方で、開発、実装、生産を前に進めるための課題が存在する。コスト、製造可能性、信頼性、機能が、依然として顕著な課題となっていると、米エイアイ
社(AEye)の最高R&D責任者で、(AIと適応型ライダを組み込んだ)自動運転車用センシング及び知覚システムの開発者である、ホッド・フィンケルシュタイン氏(Hod Finkelstein)は言う(図 2)。
「(すべてが)非常に重要な要素である。最初のカテゴリー(コスト、製造可能性、信頼性)が、私の意見では、現時点でより重要である。自動運転車を製造する際には、学生を乗せて大学のキャンパスをめぐるシャトルバスを思い浮かべるとよい。人間を乗せるという点で両者は共通している。あるいは、量産アプリケーション、つまり、私たちの誰もが運転する車を思い浮かべてもよい」と同氏は述べた。
フィンケルシュタイン氏は、「見栄えの良いPowerPointのスライドやデモを作成するだけでなく、自動車に実際に組み込むことのできる、信頼性の高い量産製造を目指すための課題」が存在すると付け加えた。それは、製造段階の課題に関連付けることができる。ライダ企業の中には、コンポーネントやシステムを装置(自動車)メーカーに直接供給する、ティア1の自動車部品メーカーを通して、製品を供給する企業もある。
残念ながら、そのような戦略的提携をティア1と結ぶ企業は、ライダ業界ではごく少数である。「そしてそのような提携を通してしか、システムの機能という点で、車載向けの量産体制の確立を実際に目指すことはできない」とフィンケルシュタイン氏は述べた。
非常に遠くまでの範囲を視界にとらえることが、自動運転車に不可欠な機能の1つであり、ライダはこの機能を支援することができる。「時速55マイルで走行している場合、停止するまでにはかなりの時間がかかる。また、隣を走っている車両が割り込もうとする場合は、必ずそれに気づかなければならない。道路を走行していて前方にボールが転がってきたら、その後を追いかけてくる子供が来る前に、必ず停止しなければならない」とフィンケルシュタイン氏は述べた。
レンジ(検出距離)の決定も課題となっている。複数のライダ関連の書籍や論文を執筆しているポール・F・マクマナマン博士(Dr. Paul F. McManaman)によると、200mで十分と考える開発者もいれば、さらに長いレンジを目指す開発者もいるという。企業各社は、歩行者の往来や路上落下物などの側面を個々に判断して、異なるレンジとさまざまなテストポイントでシステムを開発している(図 3)。
基準の必要性
自動運転車に実装されるライダシステムを対象とした、普遍的な基準集合を定めるべき時が来ており、マクマナマン氏はそれを作成したいと考えている。マクマナマン氏は、SPIE、IEEE、Opticaのフェローで(SPIEでは会長を務めていたこともある)、米空軍研究所(U.S. Air Force Research Lab)の元チーフサイエンティストでもある。同研究所では、数多くのLADAR(laser detection and ranging)基準を策定した。
現時点では普遍的な基準が存在しないことから、マクマナマン氏は車載ライダ測定を、西部開拓時代(Wild West)になぞらえている。同氏によると、ライダシステムのテストに対し、企業各社はそれぞれ異なる測定モデルを生み出しているという。「最も難しいのは、歩き始めたばかりの幼児が自動車の間によちよち出てきて、突然そこにいるというケースだ。どうすればよいのか」と同氏は述べた。
例えば、高速に移動するバイクと道路脇にいる子供の違いを、考察してほしい。「バイクは、2車線道路の危険とされる左側を走行し、非常に高速に近づいてくる。方向指示器は付いていない。バイクには多くの金属が使われているので、それに対してレーダーが使用できる。一方、子供は金属を身に着けていないので、レーダーでは対応できない。光センサならば対応できる」とマクマナマン氏は述べた。
自動車メーカーが性能を比較したいと考える場合に、一連の測定基準が必要だと、マクマナマン氏は説明した。「一方には16種類の測定結果があり、もう一方には23種類の測定結果があって、それぞれ異なるものを測定しているというのでは、比較は難しい。ベンチマークが必要である」(マクマナマン氏)。
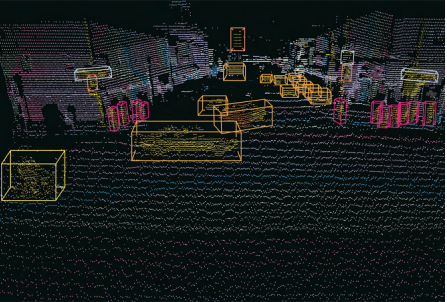
図2 人工知能(AI)駆動の適応型ライダを中核に据える、エイアイ社の4Sightシステムは、リアルタイムに目標を定めて情報を処理することにより、さらに高速で正確で信頼できるデータを提供する。(提供:エイアイ社)
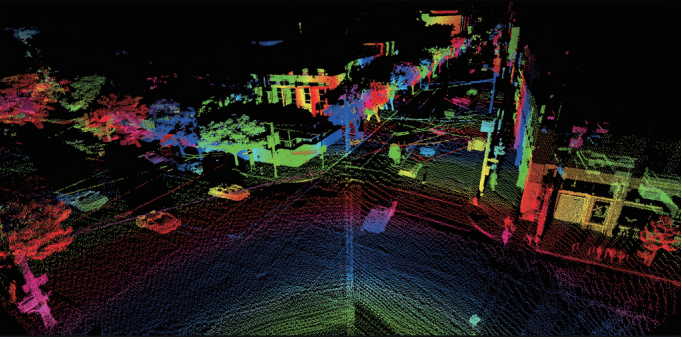
図3 エイアイ社の4Sight-Mは、交差点の周辺全体を視界にとらえた状態で160 m以上離れた位置にある架空線を検出できるほど、解像度が高い。(提供:エイアイ社)
(もっと読む場合は出典元へ)
出典元
http://ex-press.jp/wp-content/uploads/2022/07/018-020_ft_automotive_lidar.pdf